Một nhóm các nhà nghiên cứu ở Trung Quốc đã phát triển các “microfibrebot” cuộn từ tính mới và sử dụng chúng để làm tắc nghẽn tình trạng chảy máu động mạch ở thỏ - mở đường cho một loạt các phương pháp điều trị ít xâm lấn và có thể kiểm soát đối với chứng phình động mạch và khối u não.
Khi cố gắng cầm máu trong chứng phình động mạch hoặc ngăn chặn dòng máu đến khối u não (một quá trình được gọi là tắc mạch), các bác sĩ phẫu thuật thường chạy một ống thông mỏng qua động mạch đùi và điều hướng nó qua các mạch máu để đưa các tác nhân gây tắc mạch. Mặc dù được sử dụng rộng rãi nhưng những ống thông này khó dẫn hướng qua mạng lưới mạch máu phức tạp.
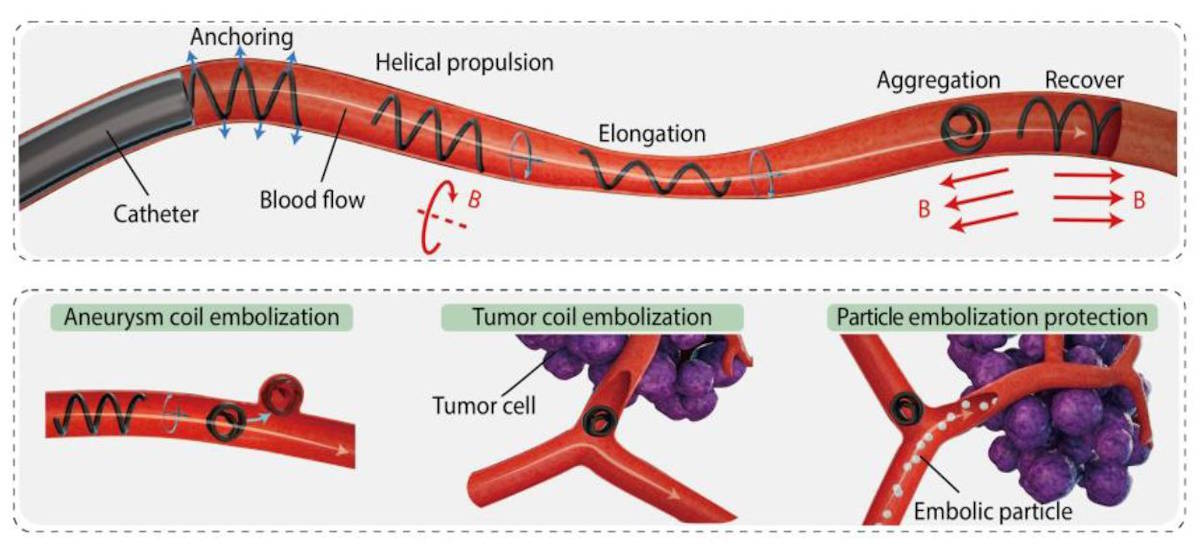
Trong nỗ lực giải quyết thách thức này, một nhóm các nhà nghiên cứu tại Đại học Khoa học và Công nghệ Huazhong (HUST) đã tạo ra các vi sợi mềm, từ tính nhỏ có thể thực hiện các quy trình như vậy từ xa. Các thiết bị, được làm từ sợi từ hóa xoắn thành hình xoắn ốc, có thể vừa với nhiều kích cỡ bình chứa khác nhau và di chuyển theo kiểu xoắn ốc khi tiếp xúc với từ trường bên ngoài. Kết quả nghiên cứu được trình bày ở Khoa học Robot, chứng minh cách sử dụng thành công các thiết bị để cầm máu động mạch ở thỏ.
Với tư cách là đồng tác giả Trương Kiến Phong giải thích, các vi sợi được tạo ra bằng cách sử dụng năng lượng nhiệt để hút các vật liệu composite mềm từ tính thành các vi sợi, sau đó được “từ hóa và đúc khuôn để tạo cho chúng có cực từ xoắn ốc”. Bằng cách điều khiển từ trường, robot vi sợi mềm từ tính đã thể hiện sự biến đổi hình thái thuận nghịch (kéo dài hoặc kết tụ) và lực đẩy xoắn ốc thông qua dòng máu (cả ngược dòng và xuôi dòng). Điều này cho phép nó được điều hướng qua các hệ thống mạch máu phức tạp và thực hiện thuyên tắc bằng robot ở vùng dưới milimet.
“Bài báo cho thấy cách chúng tôi thực hiện ống nghiệm tắc mạch chứng phình động mạch và khối u trong mô hình mạch máu thần kinh, đồng thời thực hiện điều hướng và tắc mạch bằng robot dưới phương pháp soi huỳnh quang thời gian thực trong một trong cơ thể mô hình động mạch đùi thỏ,” Zang nói. “Những thí nghiệm này chứng minh giá trị lâm sàng tiềm tàng của công việc này và mở đường cho các lựa chọn phẫu thuật tắc mạch được hỗ trợ bằng robot trong tương lai.”
Chức năng neo
Theo tác giả đầu tiên Xurui Liu, nghiên cứu sinh tiến sĩ tại HUST, mỗi microfibrebot có chức năng neo giữ, tương tự như chức năng của stent mạch máu, giúp nó được neo ổn định vào thành trong của mạch máu thông qua ma sát tiếp xúc để tránh bị cuốn trôi bởi nước. dòng máu.
“Sự phân bố từ hóa xoắn ốc của nó cung cấp cho robot vi sợi một hướng từ hóa thực dọc theo trục trung tâm của nó. Bằng cách áp dụng một từ trường bên ngoài phù hợp với hướng của hướng từ hóa ròng, robot có thể được kéo dài ra,” cô nói.
“Ngược lại, khi từ trường bên ngoài ngược với hướng từ hóa của lưới, robot sẽ tập hợp lại,” cô cho biết thêm. “Độ mềm và độ bền cao của robot vi sợi này đảm bảo rằng chức năng tái tạo hình thái của nó vẫn hoàn toàn có thể đảo ngược sau hơn một nghìn chu kỳ tổng hợp và kéo dài.”
Sự thay thế đầy hứa hẹn
Ngược lại với các robot mềm từ tính được báo cáo trong nghiên cứu trước đó, Zang xác nhận rằng các đặc tính hướng từ hóa xoắn ốc của robot mới cho phép các chế độ biến dạng và chuyển động của chúng được tách rời trực giao độc lập với từ trường điều khiển, mang lại “sự linh hoạt điều khiển từ trường độc đáo”.
Zang giải thích: “Tính năng này không chỉ cho phép một robot vi sợi duy nhất di chuyển với tốc độ cao ngược với dòng máu dưới tác động của từ trường quay mà còn cho phép kiểm soát độc lập hình dạng và chuyển động của nhiều vi sợi”.
Ông cho biết thêm: “Ngoài ra, các thiết bị này tương thích với các ống thông can thiệp thường được sử dụng để tối đa hóa tiềm năng sử dụng của chúng trong môi trường lâm sàng”.
Đối mặt với những thách thức của các phương pháp truyền thống như tắc mạch qua ống thông - đặc biệt là về hạn chế hoạt động và độ chính xác không đủ, cũng như các rủi ro sức khỏe liên quan đến việc bác sĩ tiếp xúc với bức xạ trong thời gian dài (từ hướng dẫn chụp X-quang system) – Zang chỉ ra rằng sự phát triển của công nghệ microfibrebot từ tính cung cấp cho các bác sĩ lâm sàng một phương tiện mới để cải thiện các phương pháp điều trị hiện có.

Robot siêu nhỏ xếp hàng cho liệu pháp tế bào gốc
“Sự phát triển của microfibrebots mang đến một góc nhìn mới về điều trị tắc mạch máu và cho thấy tiềm năng ứng dụng trong công nghệ điều trị phẫu thuật xâm lấn tối thiểu. Công nghệ này cung cấp sự bổ sung hoặc thay thế hiệu quả cho công nghệ thuyên tắc ống thông truyền thống bằng cách kiểm soát chính xác tình trạng tắc nghẽn dòng máu,” ông nói.
Zang lưu ý rằng mặc dù công nghệ này cho thấy tiềm năng nhưng vẫn còn những thách thức cần vượt qua trước khi ứng dụng lâm sàng. Chúng bao gồm tối ưu hóa cấu trúc của microfibrebots, tăng khả năng tương thích sinh học của vật liệu và phát triển hệ thống theo dõi và định vị mạch máu. Ông cho biết thêm: “Nhóm nghiên cứu đang nỗ lực giải quyết những vấn đề chính này để thúc đẩy ứng dụng công nghệ”.
- Phân phối nội dung và PR được hỗ trợ bởi SEO. Được khuếch đại ngay hôm nay.
- PlatoData.Network Vertical Generative Ai. Trao quyền cho chính mình. Truy cập Tại đây.
- PlatoAiStream. Thông minh Web3. Kiến thức khuếch đại. Truy cập Tại đây.
- Trung tâmESG. Than đá, công nghệ sạch, Năng lượng, Môi trường Hệ mặt trời, Quản lý chất thải. Truy cập Tại đây.
- PlatoSức khỏe. Tình báo thử nghiệm lâm sàng và công nghệ sinh học. Truy cập Tại đây.
- nguồn: https://physicsworld.com/a/magnetic-microbots-show-promise-for-treating-aneurysms-and-brain-tumours/

