車載ネットワークは、ドメイン アーキテクチャからゾーン アーキテクチャへの移行が始まっています。ゾーン アーキテクチャは、より少ないプロトコル、より少ない配線を使用して車内の通信を簡素化し、高速化し、最終的にはコストを削減するアプローチです。
ゾーン アーキテクチャでは、車両をより管理しやすく柔軟なゾーンに分割しますが、そこに到達するには時間がかかります。 現在の車両にはレガシー テクノロジーが数多く搭載されているため、自動車メーカーはアルファベットのスープのようなプロトコルのコレクションをサポートする必要があります。 たとえば、車両は、内部開発されたプロトコルに加えて、Bluetooth、USB、LTE をサポートするインフォテインメント用のモバイル デバイスをサポートする場合があります。 カメラの場合、MIPI が主流のプロトコルです。 また、ADAS、ECU、センサー フュージョンのリアルタイム制御については、おそらくサポートされるでしょう。 コントローラエリアネットワーク (CAN)、ローカル相互接続ネットワーク (LIN)、イーサネットなど。
この変化を可能にする重要な要素の 93 つは、より高速な通信です。 数年前、自動車ネットワークの 100% は 10Mbps 未満の速度で動作していましたが、その多くは一夜にして変わるものではありません。 実際には、100/1000/1BASE-TXNUMX である可能性が高くなります。 車載イーサネット CAN やその亜種などの低速バスは、引き続きほとんどの低速通信を提供します。 しかし、自動車がさまざまなゾーンからの入力に基づいてより重要な決定を下し始めるにつれて、データの迅速な移動のために、時間の経過とともにマルチギガビットの速度が自動車に追加されるでしょう。
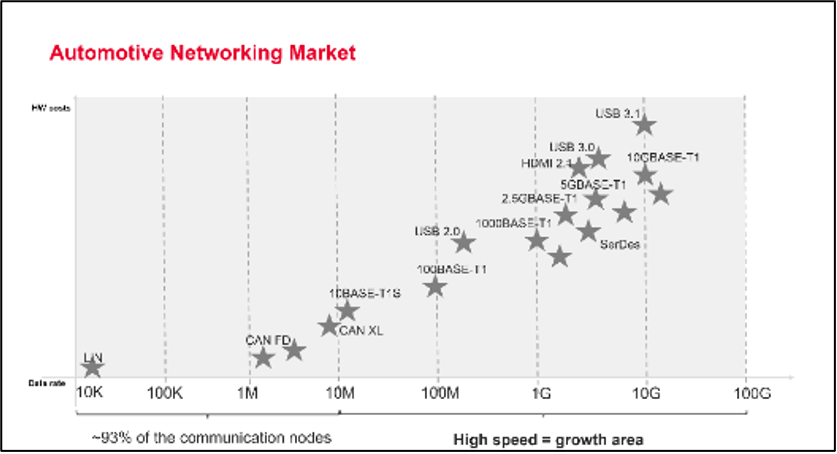
図1:各種車載ネットワーク技術の比較。 出典: キーサイト
「自動車業界は、車載イーサネットが従来の接続をすべて置き換えるものではないと期待しています」と、オートモーティブ イーサネット テクノロジーのソリューション アーキテクト兼プランナーであるジェ ヨン氏は述べています。 キーサイト。 「その代わりに、今後もさまざまな通信プロトコルや通信方式が混在することになるでしょう。 図 1 の右上にある巨大な星団は最もダイナミックであり、多くのイノベーションが起こっている場所です。 物理学からわかるように、ボーレートが高くなると、電気的干渉、ノイズ源、反射、減衰、その他の損失が増加し、信号やその信号内で伝送されるデータに影響を与えます。 データ速度が速いほど、展開前のテストがより困難かつ重要になります。 マルチギガビット車載イーサネットは、IEEE 802.3ch および IEEE 802.3cy 規格に基づく高速通信のニーズを促進すると予想されます。 たとえば、IEEE 802.3cz グループから最近リリースされた新しいマルチギガビット光自動車イーサネット規格があります。 今は自動車ネットワーキングにとって興味深い時期であり、今後多くの課題と革新が起こることが予想されます。」
他の人もこれに同意し、通信の高速化は一度にすべてを切り替えるというよりはむしろ進化の方向であると主張します。 しかし、それでもなお、この変化の利点は重要です。
David Fritz 氏、ハイブリッドおよび仮想システム担当副社長 Siemens Digital Industries Softwareは、車載イーサネットがこの分野のリーダーとなる可能性が高いと指摘しています。 「この帯域幅は、間もなく L4 および L5 自律性のすべての実装をサポートする予定です。 さらに、CAN フレームはイーサネット ネットワーク経由で送信できるため、ゲートウェイが既存の ECU をサポートするローカル CAN および CAN FD ゾーン ネットワークを管理できるようになります。 車載イーサネットの重量と電力の側面は、従来の CAN ネットワークよりもはるかに優れています。 Can FD はイーサネットの競合相手として浮上していますが、どちらが勝つかについてはまだ結論が出ていません。 ただし、XNUMX つのヒントは、上記の特性により、センサー、アクチュエーター、ECU プロバイダーが車載イーサネットを直接サポートしていることです。」
車載イーサネットは、定着した選択肢です。 「ここでの目標の XNUMX つは、独自のソリューションを置き換える代わりに、プロトコル、コントローラー、PHY などの標準化されたネットワーク テクノロジーをできる限り多く使用することです」と、自動車ソリューションのグループ ディレクター、ロバート シュヴァイガー氏は述べています。 ケイデンス。 「さまざまなネットワーキング テクノロジーの種類を減らして、より均質なネットワーク アーキテクチャを作成することも目的の 10 つです。 そのためには、1BASE-T100、1BASE-T1000、1BASE-T10、1G BASE-TXNUMX などの車載イーサネットを活用する必要があります。」
シュヴァイガー氏は、ゾーン アーキテクチャの鍵は、車載ネットワークの全体的な帯域幅と効率の大幅な向上であり、ゾーン アーキテクチャは主に車載イーサネット、ASA Motion-Link/MIPI A-PHY、MIPI CSI2、MIPI DSI、 POF、CAN、LIN。 「もちろん、これは OEM ごとに異なる可能性があり、独自のソリューションもまだ混在しています。」
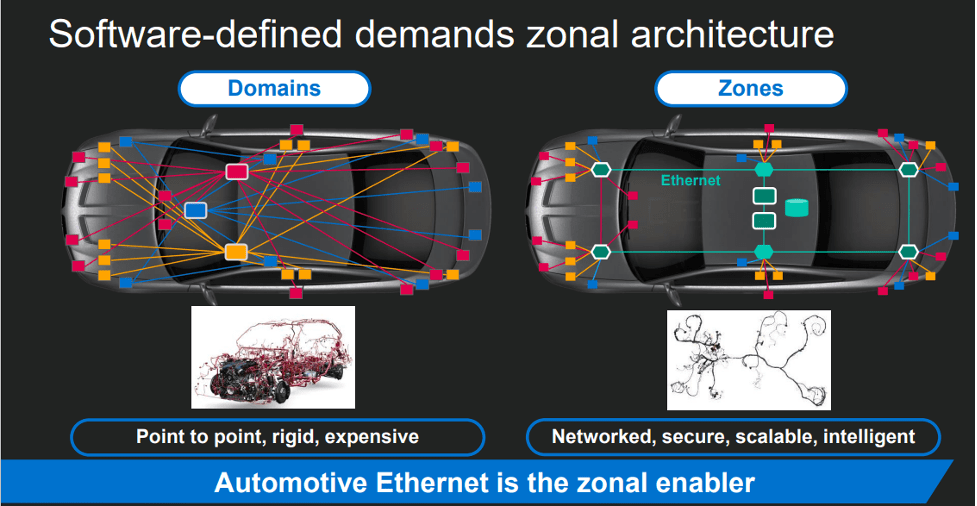
図 2: ゾーン アーキテクチャにより、従来のドメイン アプローチが簡素化されます。 出典: マーベル
もちろん、自動車のデザインが一夜にして変わることはありません。 通常、設計サイクルは少なくとも数年続きますが、一部のコンポーネントやサブシステムの設計はそれよりもずっと長く市場に残る場合があります。 その結果、自動車ネットワークの状況は引き続きプロトコルとアプリケーション依存のスキームが混在することになるでしょう。 一部の製品は、インフォテインメントや車室内の乗員行動監視などの非リアルタイム アプリケーションに対応します。 他のプロトコルは、安全性および他のリアルタイム アプリケーションをサポートします。
「たとえば、ドライバーが車から降りるときに子供やペットが放置された場合、ドライバーは警告を受けます」と、キーサイトのオートモーティブ SerDes テクノロジーのソリューション アーキテクト兼プランナーであるケビン カーシュナー氏は述べています。 「OEM は、特に自動運転において、パフォーマンスと通信速度を向上させながら、リアルタイム アプリケーションの設計を簡素化することに取り組んでいます。」
さらに、自動車業界の電気電子 (E/E) アーキテクチャは、センサーベースの運転支援システム (ADAS) や自動運転 (AD) アプリケーションの役割など、ますます複雑な要件をサポートするために進化しています。
「高解像度のダッシュパネル、サイドミラーパネル、家庭用電子機器サービスに匹敵するインフォテインメントオプションなど、豊富なディスプレイテクノロジーが車両の内部と周囲にあります」とカーシュナー氏は述べた。 「カメラ、ライダー、レーダーなどの多くのセンサーが高解像度データをキャプチャし、それを送信または他のセンサー データと集約して、ADAS/AD アプリケーションでさらに処理します。」
サラウンドビュー カメラ システムに関しては、複数のカメラが車内のディスプレイにビデオを送信する場合もあります。 「ここでは、センサーの総数やデータ転送に必要な帯域幅など、アプリケーション要件が E/E の選択を左右します」と同氏は述べています。 「これは、通信テクノロジーの選択がまさにアプリケーションに依存することを意味します。 高速デバイスのコスト、複雑さ、消費電力を考慮すると、低速機能では「オーバーエンジニアリング」された高速バスを使用してはなりません。 特定のテクノロジーはポイントツーポイントですが、他のテクノロジーはマルチドロップ ノードの効率をサポートします。 一部の高速リンクは対称であり、高出力の計算ノード間の双方向通信をサポートします。 対照的に、他のものは、単一方向で高スループットを必要とするアプリケーション (例: ダウンストリームのカメラ出力、アップストリームのコマンドと制御) をサポートするために非対称になるように設計されています。
ドメイン アーキテクチャからゾーン アーキテクチャへ
ECU は車両の基本的な構成要素です。 これらは、エンジン動作、トランスミッション、緊急ブレーキなどのさまざまな機能、およびタイヤ空気圧や室内温度制御などのその他の監視機能を制御します。 ゾーン アーキテクチャとは異なり、ドメイン アーキテクチャは、ドメインの物理的な場所を考慮せずに、さまざまな機能をドメインにグループ化します。 ドメイン アーキテクチャでは、各ドメインをサポートする ECU が車両内に分散される場合があります。 その結果、これらのドメインに接続するには長いケーブル ハーネスが必要になる場合があります。
従来、OEM は設計にドメイン アーキテクチャを使用していました。 ドメイン アーキテクチャで使用される主なネットワーク プロトコルは、コントローラー エリア ネットワーク (CAN) とローカル インターコネクト ネットワーク (LIN) で、どちらも OEM がさまざまな機能のリアルタイム制御を実行するために使用してきました。 CAN (ISO 11898-1:2003) は、XNUMX つの異なる速度をサポートするシリアル ネットワーク プロトコルです。
- 低速 - 125 メートルのバス長で 500 Kbps (最大)
- 高速 — バス長 1 メートルで 40 Mbps (最大)
- フレキシブル データ レート (CAN FD) — 15 メートルのバス長で 10 Mbps (最大)
CAN は、ECU を含む分散型リアルタイム制御および多重化デバイスをサポートする上で信頼性が高く、比較的低コストであることが証明されています。 CAN を補完する LIN (ISO 17987-2) もシリアル ネットワーク プロトコルです。 19.2 Kbit/s という低速のデータ速度をサポートしており、通常は調光などの客室の照明制御に使用されます。
業界がソフトウェア定義車両や自動運転をサポートするために、より多くのソフトウェアやエレクトロニクスを組み込む方向に進むにつれて、より高速な通信に対する需要が高まっています。 意見はさまざまですが、一部の専門家は、将来の自動運転には、さまざまなリアルタイム ADAS および ECU 機能をサポートするために 50Gbps の範囲のデータ転送速度が必要になると示唆しています。 現在、イーサネットは 100 Gbps の能力があり、イーサネット アライアンスによると、今後数年で毎秒テラビットに達する可能性があります。
これは、新しいテクノロジーや新しい機能が進化するにつれて変わる可能性があります。 近年、自動車ネットワークはドメイン ベースから自動車イーサネット ベースのゾーン アーキテクチャに移行しています。
マーベルの自動車マーケティング担当バイスプレジデント、アミール・バーニブ氏は、電気自動車内のケーブルハーネスの総重量は、自動車のエンジンとシャーシの重量に次ぐものであると述べた。 ケーブルの長さと数を減らすと、車両の総重量が減り、燃料効率 (または電気自動車の航続距離) が向上し、製造プロセスが簡素化されます。
コミュニケーションを簡素化する取り組みも行われています。 現在、個々のネットワークは、さまざまな帯域幅とさまざまなプロトコルをサポートする必要があります。 たとえば、ADAS により、ネットワーク プロトコルの帯域幅を増やす必要性が高まります。
ワイヤレス通信は、その多くが自動車以外で開発され、洗練されているため、役立ちます。 「無線プロトコルは通常、自動車に特化したものではないため、民生用電子機器のサポートを可能にするためにさらに統合されることになるでしょう」と、自動車関連事業部門自動車パートナーシップ担当ディレクターのベルンハルト・リル氏は述べています。 腕 と説明した。 「業界全体で、これらの無線プロトコルを将来の自動車固有のユースケースにどのように使用できるかを決定する作業が行われています。 現在、自動車は大量のネットワークを使用しており、通信を統合する傾向に拍車がかかっています。 E/E アーキテクチャに関しては、ネットワークに重点が置かれています。 自動車 OEM は、CAN-FD および 10BASE-T1S などのイーサネット ベースのネットワークに注目しています。 さらに、相互運用可能な 2.5Gbps バックボーン イーサネットは量産用途に向けて強化する必要があり、高速接続にはコヒーレント シリコン設計の PCIe が使用されます。」
ゾーン アーキテクチャとドメイン アーキテクチャ
高速イーサネットを使用するゾーン アーキテクチャのアイデアは、ドメイン アーキテクチャに比べて製造がシンプルで容易であるため、勢いを増しています。 この技術アプローチでは、複数のゾーン スイッチを使用してさまざまな機能を制御します。
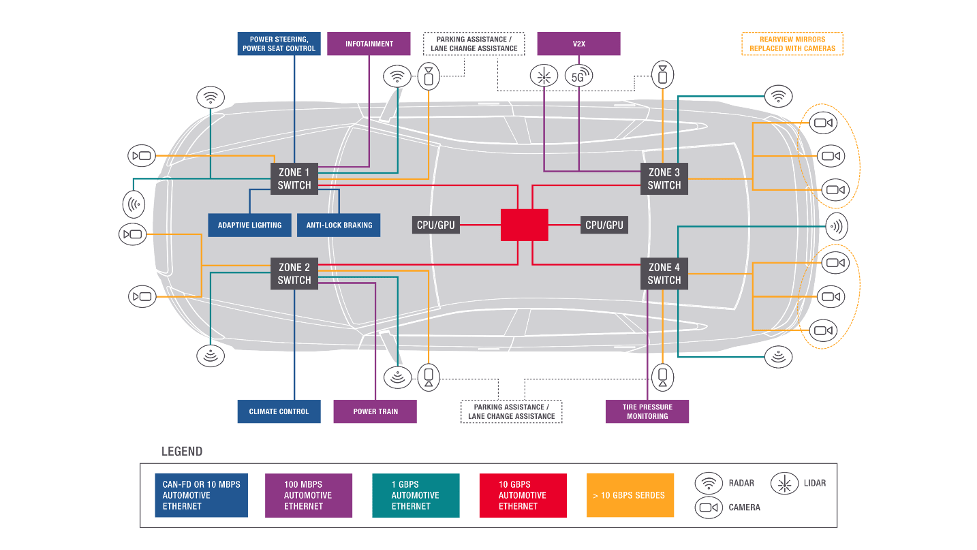
図 3: ゾーン アーキテクチャ設計では、速度の異なる複数のゾーン スイッチを使用して、車両内のさまざまな機能を制御します。 出典: キーサイト
オペレーティング システムとハードウェアの間に位置するミドルウェア スタックは、ゾーン アーキテクチャや、次のような多くの自動運転機能においてますます重要になります。 ADAS 緊急ブレーキはミドルウェアによって実行されます。 ミドルウェアでは、サービスの品質が鍵となります。これには、音楽のストリーミングよりもミッションクリティカルでリアルタイム、時間に敏感なトラフィックを優先することが含まれます。
Arm の Rill は、自動車 E/E アーキテクチャが今後ゾーン型に変化するという明確な兆候を捉えています。 彼はアームが 活発に働いています エコシステム パートナーと協力して、ゾーン コントローラーの使用方法と、ボディ アプリケーションに加えて ADAS やデジタル キャビン関連のユース ケースを含む、ゾーン コントローラーでどのような機能をホストできるかを決定します。 「自動車業界の長い開発サイクルを考慮すると、ゾーン アーキテクチャへの移行には時間がかかるでしょう。」
レガシー要因
それにもかかわらず、OEM によって現在使用されているレガシー ネットワーク プロトコルの多くでは、イーサネットを使用したゾーン アーキテクチャへの移行は、思っているよりも難しい可能性があります。 新しい設計は、レガシー プロトコルを置き換えた後でも、少なくとも古い設計と同等に機能する必要があります。 本当の課題は、新製品の導入に影響を与えずにスムーズな移行を実装することです。 その結果、OEM はゾーンの変革の度合いとスケジュールが異なる場合があります。
「ほとんどのアプリケーションには、リアルタイム操作などの車両の運用面をサポートする遅延やペイロードの要件があります。たとえば、高遅延/低ペイロードには LIN、低遅延/高ペイロードにはイーサネットなどです。」と、同社のシニア ディレクター、レイ ノタラントニオは述べています。アメリカ大陸向けの車両ユーザー エクスペリエンス セグメント インフィニオンテクノロジーズ。 一般に、ネットワークはこれらのニーズに合わせてサイズ設定され、これによりアプリケーションごとに最適なコスト対パフォーマンスの比率がサポートされます。 これにより、ネットワークが設計上過剰にも過小にも利用されないことが保証されます。
一方、ソフトウェア デファインド ビークル アプローチへの移行を計画している OEM は、ゾーン アーキテクチャを選択することになります。 「この大規模なゾーニングには、より安全/セキュリティ指向のゾーン モジュールを接続するマルチ Gb の高度に設計されたイーサネット バックボーンの導入が含まれ、同じ物理リソースを共有するシステムの完全な分離を実現できます」と Meindert van den Beld 氏は述べています。 NXP の上級副社長兼車載ネットワーキング担当ゼネラルマネージャー。
そのため、新興企業や新しい OEM は、レガシー設計の OEM よりも柔軟にゾーン アーキテクチャを採用できる可能性があります。
「ゾーン アーキテクチャの導入は、個々の OEM 戦略に大きく依存します」と、同社製品マーケティング ディレクターのサム ゴールド氏は述べています。 ルネサスハイ パフォーマンス コンピューティング、アナログ、およびパワー ソリューション グループ。 「新規プレイヤーは既存のアーキテクチャをより自由に変更したり、ゼロから始めて新しいアーキテクチャのコンセプトを実装したりすることもできます。 一方、確立された OEM は、レガシーへの強い依存関係に直面し、相互依存性の強い多種多様な車種を保有している可能性があります。 これは、ネットワーク トポロジまたはアーキテクチャの限界的または進化的な変更のみを適用できるという事実につながります。 ハーネスのコスト、複雑さ、重量を削減するという全体的な目標は、すべての OEM によって共有されています。 ここでも、ハーネスの製造が自動か手動かという側面が大きなコスト要因となります。」
ゾーンのセキュリティ上の懸念
セキュリティは依然として自動車業界の大きな懸念事項であり、理論上はゾーン アーキテクチャの方が監視が容易ですが、CAN、LIN、イーサネット、その他のテクノロジが組み合わされる可能性のある変革段階では、新たな脆弱性が生じる可能性があります。 これは、OEM 側がサイバー攻撃のリスクを軽減するためにさらに多くの取り組みを行うことを意味します。
キーサイトの自動運転車ビジネスライン製品マネージャーのキャリー・ブローウェン氏は、「自動車業界はますます複雑化するディスプレイや接続の需要に対応するようになっており、複雑さが新たな常態となっている」と述べた。 「車内のネットワークがより高速かつ複雑になるにつれて、一貫した機能を確保するためにより高いレベルのテストが必要になります。 これは単なる贅沢ではなく、すべてのインターフェイスをサイバー脅威から確実に保護するために必要です。 たとえば、CAN、Bluetooth、車載イーサネット、SerDes、ワイヤレス、セルラーなどの車内接続が増えると、情報が破損したり、潜在的な脅威インターフェイスとなる可能性が高くなります。 したがって、設計、検証、および製造中に、規制 (ISO/SAE 21434 および UN-R155) への準拠とネットワーク自体の検証が必要です。」
インフィニオンのノタラントニオ氏もこれに同意した。 「ネットワーク セキュリティは、何年も前から車両に標準装備されています。 メッセージは、安全なドメイン内のハードウェア セキュリティ モジュールと専用ソフトウェアを使用して認証されます。 CAN および CAN-FD ネットワークはセキュリティを最初に追加したネットワークの XNUMX つであり、それ以来、セキュリティは拡大するばかりです。 現在、車両のイーサネットなどの新しいネットワークを保護するための選択が行われており、MACSEC や IPSEC を選択する人もいますが、セキュリティが確保されていないものは何もありません。」
同時に、車両への接続性がますます高まる中、自動車ネットワークはサイバーセキュリティ リスク管理を必須として設計する必要があります。
ルネサスのゴールド氏は「OEMは多層防御を開発するだけでなく、暗号通貨の機敏性も可能にする必要がある」と述べた。 「多層防御では、車両の外部通信の保護 (TLS、外部 I/F 認証など) と内部通信の保護 (IDS/IPS、TLS、MACsec、IPsec、SecOC など) を考慮する必要があります。セキュリティ ログ上記の保護メカニズムは車両セキュリティ オペレーション センターによって分析でき、必要に応じて無線ファームウェア経由でセキュリティ パッチを展開し、車両の自動車ネットワークに対するサイバー脅威を軽減できます。 キーの長さが長くなったり、暗号システムが壊れたりするため、自動車ネットワーク プロトコルのアップデートをサポートするには、暗号の俊敏性を考慮する必要があります。 ポスト量子暗号は次世代アルゴリズムとして検討されています。 セキュリティのボトルネック (分散セキュリティ処理など) を防ぐために、適切なアーキテクチャを定義する必要があります。」
OEM採用
OEM が 100% イーサネット ネットワークを実装する時期を正確に予測することは困難ですが、ほとんどの OEM は現在および将来の設計でイーサネットを使用する方向に移行しています。 Marvell の Bar-Niv 氏は、今後数年間で導入率が加速すると示唆しました。
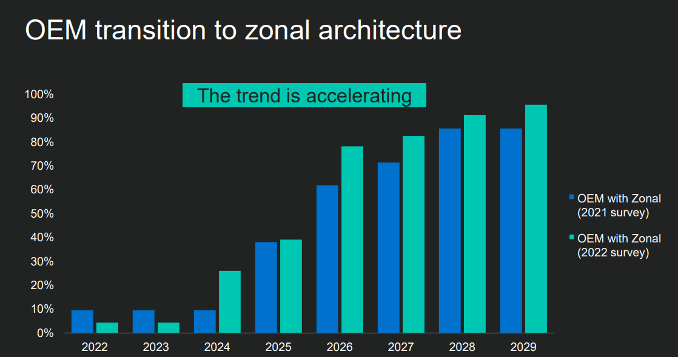
図 4: ゾーン アーキテクチャの採用は、今後数年間で加速すると予想されます。 出典: マーベル
実際、導入はすでに始まっています。 BMW は、車両にイーサネットを初めて組み込んだ企業の 2021 つです。 XNUMX年には量産モデルBMW iXにギガビットイーサネットを導入した。 現在、イーサネットはすべての量産モデルで使用されています。
ヒュンダイは、他のすべての OEM と同様に、CAN とイーサネットのハイブリッド モデルを使用していると報告しました。 その Kona と Santa Fe は、イーサネットを使用して OTA をサポートするモデルの例です。 Mercedes-Benz では、イーサネットと CAN/LIN を組み合わせて使用しています。 2013 年、同社の 222 (S クラス) モデルは、ほとんどの制御に CAN および LIN 2.1 を使用し、信号灯にはイーサネットを使用しました。 2020 年までに、メルセデス ベンツの 223 (S クラス) モデルのラインアップでは、主要ドメイン間の通信にイーサネットが使用されていました。 アウディは 2024 年から、分散型プレミアム プラットフォーム エレクトリックに基づくまったく新しい E/E アーキテクチャ (E3) を導入し、高速バックボーンを含むイーサネット テクノロジーを拡張します。
ほとんどの OEM は設計にイーサネットを組み込んでいますが、トヨタのモデルは現時点ではイーサネットをサポートしていません。
一方、米国の OEM はゾーン アーキテクチャに移行しています。 インフィニオンのノタラントニオ氏は、「ゾーンアプローチの一部は、高性能コンピューティングセンターを自動車を自動車たらしめているすべての機能に接続し、より多くの機能を単一のゾーンに統合することで実現している」と述べた。 「この統合により、材料コストとワイヤーハーネスの複雑さの削減に役立ちます。」
さらに、これらの OEMS は、単に機能を追加したり、ECU を追加したりするだけではなく、ワイヤー ハーネスやソフトウェアの複雑さの大きな要因となっていると述べました。
日本でも目標は似ています。 しかしそこでは、OEM は車両を構築するためにドメインベースのアーキテクチャを選択しました。 「いずれの場合も、中央ノードでほとんどの更新が可能で、ゾーンまたはドメインでは限定的な更新が可能ですが、ソフトウェア デファインド ビークルは、ソフトウェアとワイヤー ハーネスの複雑さを軽減するための将来の道です」とノタラントニオ氏は述べています。
将来のビジョン
OEM の現在の取り組みを踏まえると、ゾーン アーキテクチャは今後も勢いを増していくと考えて間違いありません。 ゾーン自動車アーキテクチャは、自動車設計を簡素化するだけでなく、サプライチェーンに新たな機会を生み出します。
「自動車ネットワークの複雑さを軽減する可能性のあるソリューションであるゾーン アーキテクチャにより、OEM は車両の電子システムをゾーンに編成することで配線と通信経路を簡素化し、各ゾーンが特定の機能を処理してコスト削減、効率の向上、信頼性の向上を実現できます。」と Mei Ching 氏は述べています。 (Maggie) Lim 氏、キーサイトの自動運転車ビジネス ライン ソリューション サポート。 「ケーブル ハーネスの重量と複雑さを軽減するという主な目的は、高速通信テクノロジーを使用してデータ スループットを向上させるという要求とは相容れません。」
また、インライン コネクタを使用して複数のネットワーク セグメントに接続するなど、長距離にわたる通信チャネルの動作が要求されるため、電気的性能に厳しい要件が課せられます。 「これは、新興規格が許容されるチャネル損失を厳密に定義し、テスト方法で性能を検証する必要があることを意味します」とリム氏は述べた。 「アプリケーションの要件によって、E/E アーキテクチャの選択が決まります。 さまざまなセンサーを XNUMX つのリンクに集約してケーブルの重量とコストを削減すると、スループット要件が高まります。 効率と信頼性の向上、および重量の削減が重要な推進力となります。 ただし、ゾーン アーキテクチャが主流になるかどうかは、技術の進歩、業界での採用、自動車エコシステムの進化するニーズなど、多くの要因によって決まります。 自律性のレベル、接続要件、コストの考慮事項が要因となります。 業界はダイナミックであり、自動車アーキテクチャの進化は、継続的な技術開発と、現実世界のアプリケーションでのこれらのコンセプトの実装の成功にかかっています。」
さらに、ゾーン アーキテクチャは、ECU、ネットワーク、UTP/STP 配線の統合に加えて拡張性を約束し、分散/ドメインベースのアーキテクチャと比較して全体的なコストの削減に役立ちます。 「OTAソフトウェアのアップグレードにより、OEMは車両のライフサイクル中に追加の機能やサービスを提供できるようになり、ゾーンアーキテクチャはOTAプロセスを大幅に改善します」とケイデンスのシュヴァイガー氏は付け加えた。
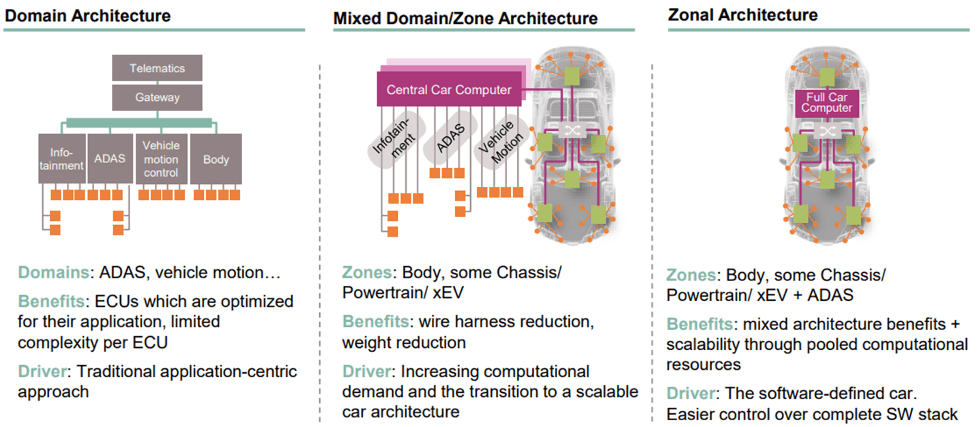
図 5: 近い将来、ドメイン アーキテクチャとゾーン アーキテクチャが共存するようになります。 出典: インフィニオン
ゾーン アーキテクチャは将来のものであると広く考えられていますが、変革には時間がかかります。 一部の OEM は全速力で前進していますが、他の OEM は引き続きドメイン アーキテクチャをサポートしています。 その結果、自動車設計では当面、さまざまなネットワーク プロトコルが混在して使用されることになるでしょう。
参考文献
SDV にとってソフトウェアは最大の課題です
ソフトウェア デファインド ビークルの普及に伴い、問題は急激に増大します。
自動車の複雑さ、サプライチェーンの強さには技術協力が必要
業界が電動化と自動運転に軸足を移すにつれて、自動車エコシステムの関係は深い技術開発にまで広がっています。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- PlatoData.Network 垂直生成 Ai。 自分自身に力を与えましょう。 こちらからアクセスしてください。
- プラトアイストリーム。 Web3 インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- プラトンESG。 カーボン、 クリーンテック、 エネルギー、 環境、 太陽、 廃棄物管理。 こちらからアクセスしてください。
- プラトンヘルス。 バイオテクノロジーと臨床試験のインテリジェンス。 こちらからアクセスしてください。
- 情報源: https://semiengineering.com/auto-network-speeds-rise-as-carmakers-prep-for-autonomy/

