| Nov 19, 2023 |
|
|
|
(Nanowerk News) For decades, scientists have envisioned a future where nimble robots could traverse rugged terrain and squeeze into tight spaces, ideal for search and rescue missions, industrial inspection, and medical procedures. However, traditional rigid robots built from hard materials like metals have proven ill-suited for navigating unpredictable environments. As a result, researchers have turned to soft robotics, constructing flexible machines from elastic polymers and hydrogels. But realizing truly effective soft robots has proven an enduring challenge.
|
|
A core difficulty is locomotion. Unlike conventional robots wheeled or legged, soft continuum robots lack discrete joints. Potential solutions like chemical fuels and embede pneumatic networks add bulk and reduce durability. This has spurred interest in remote actuation utilizing light to wirelessly induce motion by stimulating color-changing materials. Optical control enables fast, precise activation without bulky onboard components.
|
|
Several light-driven soft robots have been demonstrated, but thus far most rely on intricate 3D-printed geometries to produce net forward propulsion from the isotropic expansion-contraction of photoresponsive gels. These complex structural designs are difficult to manufacture, requiring elaborate multistep processes and expensive specialized equipment. Simpler planar actuators that symmetrically shrink and swell tend to merely oscillate in place. As a result, existing light-driven soft robots are often slow, inefficient, constrained to limited settings like liquids, and unable to mimic robust terrestrial locomotion.
|
|
Now, researchers from Beijing University of Chemical Technology have developed soft crawling robots that move like earthworms when illuminated by infrared light. Their approach combines readily available liquid crystal polymer (LCP) films with a bioinspired bristle structure, providing directional traction on flat surfaces without intricate 3D-printing. This marks an important step toward practical soft robots that can traverse the variability of real-world environments.
|
|
The findings have been published in Advanced Intelligent Systems (“Photothermal-Driven Crawlable Soft Robot with Bionic Earthworm-Like Bristle Structure”).
|
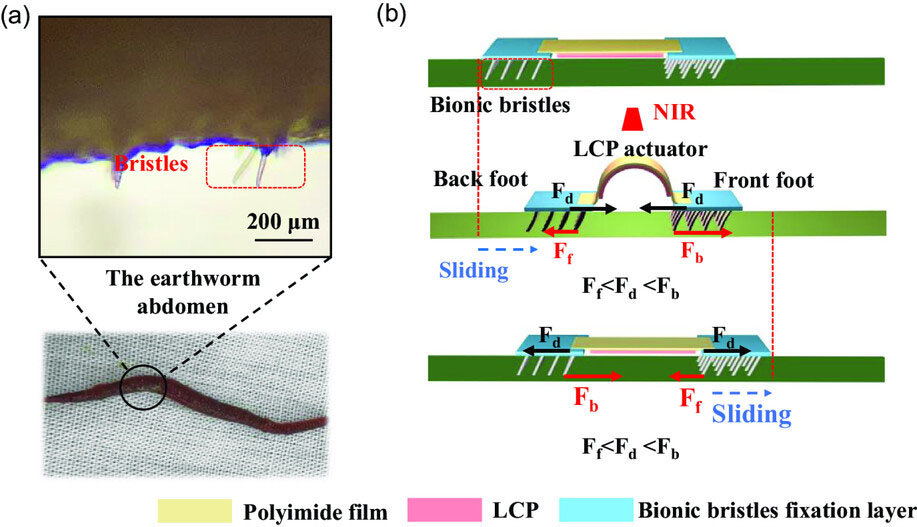 |
| Bionic principle of soft robots. a) The earthworm and the closeup of the bristles on its abdomen. b) Schematic illustrations of motion principle of soft robot with bionic bristles under photothermal driving. (Reprinted with permission from Wiely-VCH Verlag)
|
|
The researchers drew inspiration from earthworms, which use rows of angled bristles on their underside to generate asymmetry and pull themselves forward as muscles contract. Integrating similar bristles with a photoresponsive material could theoretically produce crawling activated remotely by light.
|
|
LCPs emerged as an ideal actuator material due to their reversible length changes induced by infrared light. At low temperatures, LCP molecules align, causing the film to lengthen and straighten. Infrared irradiation raises the temperature enough to randomize and shorten the LCP molecules. This photothermal effect is rapid, repeatable, and generates substantial stresses able to do mechanical work.
|
|
The LCP films provided the “muscle”, while the bristles created directional friction forces. Bristles angled backward readily slid forward but resisted backward sliding, just like the earthworm anatomy. This let periodic LCP contraction pull the bristles toward infrared light, while LCP relaxation returned the bristles forward to their initial orientation. Tuning the LCP actuator strength enabled repetitive sequences that crawled forward on flat paper surfaces.
|
|
Realizing this bioinspired design required identifying optimal bristle configurations and integrating the components into an effective multisegment robot. Systematically testing bristle angles and lengths revealed 60° backward tilting maximized asymmetry on paper, with longer bristles increasing friction disproportionately against backward motion. This allowed smaller forward friction forces to be overcome by LCP contraction.
|
|
The researchers constructed three-part robots with bristle sections fore and aft connected by a centered LCP actuator. This allowed the bristles to slide independently rather than just flex in place. Adjusting the number of LCP layers tailored the actuator strength to match the bristle friction. Too weak, and the robot strained but didn’t slide; too strong, and the bristles tore. Properly balanced, the robots crawled continuously at over 4 mm/min when illuminated with milliwatt-scale infrared light from distances up to 15 cm away.
|
|
Varying infrared intensity and actuator length further modulated speed and stride, highlighting the versatility of the approach. The simplicity of the components and fabrication process points toward applications like inspection cameras that could squeeze through cracks and crevices inaccessible to conventional robots.
|
|
This novel integration of bioinspired asymmetry and photoresponsive materials resolves a key challenge that has constrained light-driven soft robots. Locomoting without complex programmed 3D motion or reliance on environmental features makes this strategy more adaptable and scalable. The researchers aim to maximize crawling speeds and efficiency next. Long term, they envision possibilities like surviveable robots that crawl through rubble hunting for survivors or build infrastructure on other planets.
|
|
By mimicking nature’s elegant solutions, soft robotics continues to make the vision of real-world robotic artificial muscle machines more tangible. This research provides a valuable piece enabling soft robots to leave controlled laboratory settings and get out there crawling where the people need them.
|
- SEO Powered Content & PR Distribution. Get Amplified Today.
- PlatoData.Network Vertical Generative Ai. Empower Yourself. Access Here.
- PlatoAiStream. Web3 Intelligence. Knowledge Amplified. Access Here.
- PlatoESG. Carbon, CleanTech, Energy, Environment, Solar, Waste Management. Access Here.
- PlatoHealth. Biotech and Clinical Trials Intelligence. Access Here.
- Source: https://www.nanowerk.com/news2/robotics/newsid=64071.php

