05 年 2023 月 XNUMX 日 (Nanowerkニュース) ソフトロボティクスは、狭い空間に押し入り、壊れやすい物体を扱い、人間と直観的に対話できる機械を約束し、研究者を魅了してきました。 しかし、このような柔軟なデバイスを作動させるために使用される材料と方法には限界があるため、この可能性を実現することは依然としてとらえどころのない目標となっています。 モーターなどの硬いコンポーネントは動きを制限しますが、柔らかいアクチュエーターは強度、速度、寿命のバランスを取るのに苦労します。 現在、科学者たちは、光にさらされると正確にねじれ、曲がり、はためくようにプログラムできる、生物からインスピレーションを得た「原形質」液体金属ストリップを開発しました。 このブレークスルーにより、ソフトロボットが現実世界のアプリケーションに這い、掴み、羽ばたくのに必要な多用途性がついに解き放たれるかもしれません。 調査結果は、 高度機能材料 (「テンドリルにヒントを得たソフトロボット用のプログラム可能な液体金属光熱アクチュエータ」).
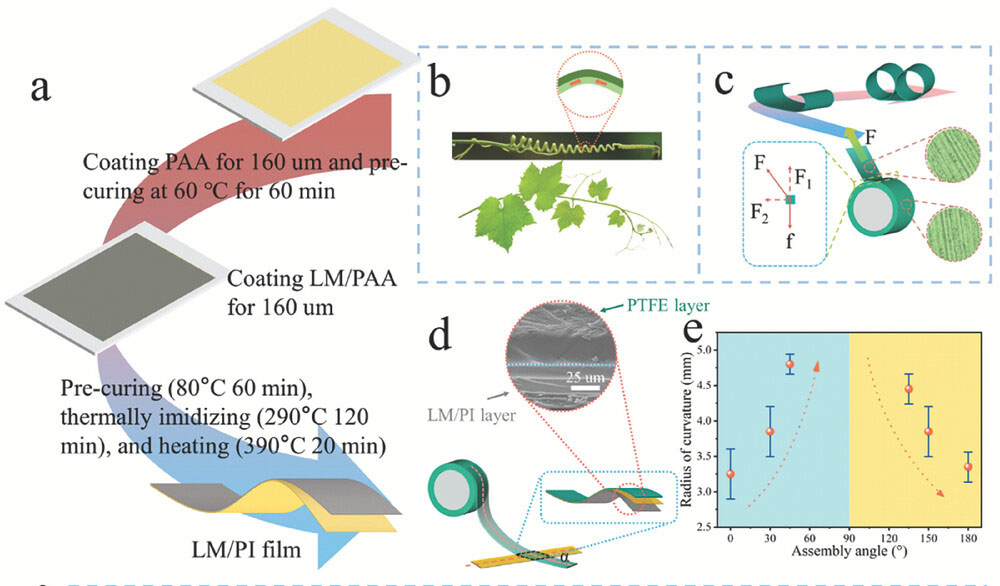 a) LM/PI フィルム作製の概略図。 b) ブドウの蔓の構造の写真と模式図。 c) 使用時の PTFE テープの収縮と曲げの力の分析。 d) LM/PI/PTFE 光熱アクチュエータは、PTFE テープと LM/PI フィルムを組み立てることによって準備されます。 e) LM/PI/PTFE光熱アクチュエータの曲率半径と組立角度の関係。 (Wiley-VCH Verlag の許可を得て転載) この研究は画期的な進歩をさらに強化し、ガリウムベースの液体金属コンポーネントの優れた特性と能力を強調しています。 これらの材料は、高い電気伝導性および熱伝導性と、低粘度の液体の流動性を独自にバランスさせています。 原子的に薄い酸化物層を形成する能力により、安全で耐久性のある用途に不可欠な無毒性と耐酸化性が保証されます。 ポリマーフィルムへのこの革新的な統合により、基材の柔軟性を維持するだけでなく、大幅な光熱応答性も追加される複合材料が得られます。 印象的なことに、実験結果はこれらの材料の堅牢性と効率性を強調しています。 液体金属を注入した積層板は、物体を自重の 48 倍まで持ち上げることが実証されており、その驚くべき強度が実証されています。 さらに、その耐久性は、2000 時間以上の連続動作に相当する XNUMX 回の動作サイクルにわたって一貫したパフォーマンスによって証明されています。 この強度と耐久性の組み合わせは、ソフトロボット工学の分野における大きな進歩を示し、高機能で多用途のロボットシステムの新時代を約束します。 ソフトロボット工学の永続的な課題は、自然な筋肉の多用途性に適合するアクチュエータを見つけることです。 形状記憶合金やポリマーなどの材料は、加熱すると成形形状を取り戻しますが、一時的な形状には永続性がありません。 ハイドロゲル 液晶エラストマーは膨潤と分子の秩序化によって持続的な構造を作り出すことができますが、これらの遷移は一方向である傾向があります。 また、モーターやバッテリーなどの硬いコンポーネントを統合しようとすると、ソフト システムの重要な利点が無効になります。 ハード要素なしで複雑な可逆動作をプログラミングすることの難しさにより、進歩が妨げられてきました。
幸いなことに、最近のいくつかの進歩により、ソフトロボティクスが新たな画期的な試みに向けて準備が整いました。 ガリウムベースの液体金属は、高い電気伝導性および熱伝導性と、低粘度流体の流動性を独自に組み合わせています。 その異常な特性は、非毒性を与え、さらなる酸化を抑制し、形状保持に十分な表面張力を提供する、原子的に薄い酸化ガリウムの皮膜が容易に形成されることに由来します。
研究者らは最近、この自発的に形成される界面活性剤により、マイクロスケールの液体金属液滴を柔軟なポリマーフィルムに組み込むことができることを発見しました。 得られた複合材料はホストの弾性を維持しながら、光熱機能を獲得します。 言い換えれば、光に反応して動くように訓練することができるのです。
最新の研究では、信じられないほど多様な持続的かつ可逆的な構成を液体金属が埋め込まれたポリマーストリップにプログラムできることが実証されました。 研究チームは、賢明なソリューションのおかげで生物インスピレーションが得られたと考えています。 研究者らは、刺激を受けると収縮して曲がるように設計された外側の「原形質」テープでストリップを重ねることにより、つる植物のとぐろを巻く蔓を再現した。 この二重層構造は、つるの蔓が成長するにつれて支柱に向かってねじれる特定の細胞活動を模倣しています。
研究者らは、慎重なラミネート製造と戦略的なレーザー加熱を通じて、らせん状にしっかりとカールしたり、ゆっくりと曲げて開いたり、状態間をスムーズに移行したりできるフィルムを製造し、再び変形するよう促されるまでそれぞれの形状を維持しました。
複雑なパターンを印刷し、フィルムの向きや成分比などのラミネートパラメータを調整することで、チームは事前にプログラム可能なモーションの驚くべきパレットを作成しました。 同社の液体金属ソリューションは、うねる、歩く、つかむ、泳ぐなどの複雑なタスクに合わせたソフト マシンの迅速なプロトタイピングを可能にします。
適応性を実証するために、研究者らは、物体を持ち上げ、物体を持ち上げ、再び下ろすという順番で手を伸ばし、閉じて物体を持ち上げる爪のついたアームを構築した。 このような巧みな操作は、従来のソフトロボットでは依然として不可能です。 これらの優れた機能は、形状を固定するサポートストリップと、目的を持った配置で取り付けられた原形質のような収縮層の生体からインスピレーションを得た組み合わせから生まれます。
この研究は、強力かつ機敏な特殊なソフト ロボットの刺激的な青写真を提供します。 研究チームは、液体金属ラミネートが重量の 48 倍の物体を持ち上げることができ、2000 回の移動サイクル後 (連続 XNUMX 時間以上) に確実に動作することを確認しました。 このような弾性は高性能ポリマー成分から生じ、埋め込まれた液体金属粒子が十分な熱と堅牢な接着に貢献します。 これらの特性を組み合わせることで、ソフト ロボット工学を悩ませている堅牢性の制限を最終的に突破できる可能性があります。
著者らはまた、レーザー入力に応じた積層板の曲がりを正確に予測する計算モデルを定式化しました。 このシミュレーション ツールを使用すると、ソフトウェア プロトタイプを介してカスタム動作を設計し、製造前に必要な物理パラメータをプレビューすることができます。
この合理化されたアプローチを通じて、研究者らは、光を利用したアメンボ、尺取虫、蝶の羽ばたきなどの独自の適応を迅速に思いつき、反復することができました。 より複雑な移動、操作、ジェスチャーを想像して現実にできるようになりました。
この研究は、自然の理解とテクノロジーの進歩による相乗効果がどのようにイノベーションを促進できるかを浮き彫りにしています。 研究者らは、進化を通じて完成された適応的な生物学的プロセスをエミュレートし、最新のナノ加工と計算手法を使用して動的な液体金属ベースのアクチュエーターを作成しました。
この作品は、現実世界の混乱をより適切に処理できるカスタマイズ可能なソフトロボットを約束します。 材料と製造技術は、低い複雑さで高い自由度を提供するため、高度に統合された応答デバイスのプロトタイピングが新たに容易になる可能性があります。
これらの液体金属の「筋肉」は、いつか亀裂をすり抜ける機敏な捜索救助ヘビ、打撲傷を防ぐ穏やかな作物摘みグリッパー、人間の動作をガイドする直感的なウェアラブルトレーナー、および適応性を必要とする同様の用途に動力を与える可能性があります。
a) LM/PI フィルム作製の概略図。 b) ブドウの蔓の構造の写真と模式図。 c) 使用時の PTFE テープの収縮と曲げの力の分析。 d) LM/PI/PTFE 光熱アクチュエータは、PTFE テープと LM/PI フィルムを組み立てることによって準備されます。 e) LM/PI/PTFE光熱アクチュエータの曲率半径と組立角度の関係。 (Wiley-VCH Verlag の許可を得て転載) この研究は画期的な進歩をさらに強化し、ガリウムベースの液体金属コンポーネントの優れた特性と能力を強調しています。 これらの材料は、高い電気伝導性および熱伝導性と、低粘度の液体の流動性を独自にバランスさせています。 原子的に薄い酸化物層を形成する能力により、安全で耐久性のある用途に不可欠な無毒性と耐酸化性が保証されます。 ポリマーフィルムへのこの革新的な統合により、基材の柔軟性を維持するだけでなく、大幅な光熱応答性も追加される複合材料が得られます。 印象的なことに、実験結果はこれらの材料の堅牢性と効率性を強調しています。 液体金属を注入した積層板は、物体を自重の 48 倍まで持ち上げることが実証されており、その驚くべき強度が実証されています。 さらに、その耐久性は、2000 時間以上の連続動作に相当する XNUMX 回の動作サイクルにわたって一貫したパフォーマンスによって証明されています。 この強度と耐久性の組み合わせは、ソフトロボット工学の分野における大きな進歩を示し、高機能で多用途のロボットシステムの新時代を約束します。 ソフトロボット工学の永続的な課題は、自然な筋肉の多用途性に適合するアクチュエータを見つけることです。 形状記憶合金やポリマーなどの材料は、加熱すると成形形状を取り戻しますが、一時的な形状には永続性がありません。 ハイドロゲル 液晶エラストマーは膨潤と分子の秩序化によって持続的な構造を作り出すことができますが、これらの遷移は一方向である傾向があります。 また、モーターやバッテリーなどの硬いコンポーネントを統合しようとすると、ソフト システムの重要な利点が無効になります。 ハード要素なしで複雑な可逆動作をプログラミングすることの難しさにより、進歩が妨げられてきました。
幸いなことに、最近のいくつかの進歩により、ソフトロボティクスが新たな画期的な試みに向けて準備が整いました。 ガリウムベースの液体金属は、高い電気伝導性および熱伝導性と、低粘度流体の流動性を独自に組み合わせています。 その異常な特性は、非毒性を与え、さらなる酸化を抑制し、形状保持に十分な表面張力を提供する、原子的に薄い酸化ガリウムの皮膜が容易に形成されることに由来します。
研究者らは最近、この自発的に形成される界面活性剤により、マイクロスケールの液体金属液滴を柔軟なポリマーフィルムに組み込むことができることを発見しました。 得られた複合材料はホストの弾性を維持しながら、光熱機能を獲得します。 言い換えれば、光に反応して動くように訓練することができるのです。
最新の研究では、信じられないほど多様な持続的かつ可逆的な構成を液体金属が埋め込まれたポリマーストリップにプログラムできることが実証されました。 研究チームは、賢明なソリューションのおかげで生物インスピレーションが得られたと考えています。 研究者らは、刺激を受けると収縮して曲がるように設計された外側の「原形質」テープでストリップを重ねることにより、つる植物のとぐろを巻く蔓を再現した。 この二重層構造は、つるの蔓が成長するにつれて支柱に向かってねじれる特定の細胞活動を模倣しています。
研究者らは、慎重なラミネート製造と戦略的なレーザー加熱を通じて、らせん状にしっかりとカールしたり、ゆっくりと曲げて開いたり、状態間をスムーズに移行したりできるフィルムを製造し、再び変形するよう促されるまでそれぞれの形状を維持しました。
複雑なパターンを印刷し、フィルムの向きや成分比などのラミネートパラメータを調整することで、チームは事前にプログラム可能なモーションの驚くべきパレットを作成しました。 同社の液体金属ソリューションは、うねる、歩く、つかむ、泳ぐなどの複雑なタスクに合わせたソフト マシンの迅速なプロトタイピングを可能にします。
適応性を実証するために、研究者らは、物体を持ち上げ、物体を持ち上げ、再び下ろすという順番で手を伸ばし、閉じて物体を持ち上げる爪のついたアームを構築した。 このような巧みな操作は、従来のソフトロボットでは依然として不可能です。 これらの優れた機能は、形状を固定するサポートストリップと、目的を持った配置で取り付けられた原形質のような収縮層の生体からインスピレーションを得た組み合わせから生まれます。
この研究は、強力かつ機敏な特殊なソフト ロボットの刺激的な青写真を提供します。 研究チームは、液体金属ラミネートが重量の 48 倍の物体を持ち上げることができ、2000 回の移動サイクル後 (連続 XNUMX 時間以上) に確実に動作することを確認しました。 このような弾性は高性能ポリマー成分から生じ、埋め込まれた液体金属粒子が十分な熱と堅牢な接着に貢献します。 これらの特性を組み合わせることで、ソフト ロボット工学を悩ませている堅牢性の制限を最終的に突破できる可能性があります。
著者らはまた、レーザー入力に応じた積層板の曲がりを正確に予測する計算モデルを定式化しました。 このシミュレーション ツールを使用すると、ソフトウェア プロトタイプを介してカスタム動作を設計し、製造前に必要な物理パラメータをプレビューすることができます。
この合理化されたアプローチを通じて、研究者らは、光を利用したアメンボ、尺取虫、蝶の羽ばたきなどの独自の適応を迅速に思いつき、反復することができました。 より複雑な移動、操作、ジェスチャーを想像して現実にできるようになりました。
この研究は、自然の理解とテクノロジーの進歩による相乗効果がどのようにイノベーションを促進できるかを浮き彫りにしています。 研究者らは、進化を通じて完成された適応的な生物学的プロセスをエミュレートし、最新のナノ加工と計算手法を使用して動的な液体金属ベースのアクチュエーターを作成しました。
この作品は、現実世界の混乱をより適切に処理できるカスタマイズ可能なソフトロボットを約束します。 材料と製造技術は、低い複雑さで高い自由度を提供するため、高度に統合された応答デバイスのプロトタイピングが新たに容易になる可能性があります。
これらの液体金属の「筋肉」は、いつか亀裂をすり抜ける機敏な捜索救助ヘビ、打撲傷を防ぐ穏やかな作物摘みグリッパー、人間の動作をガイドする直感的なウェアラブルトレーナー、および適応性を必要とする同様の用途に動力を与える可能性があります。
a) LM/PI フィルム作製の概略図。 b) ブドウの蔓の構造の写真と模式図。 c) 使用時の PTFE テープの収縮と曲げの力の分析。 d) LM/PI/PTFE 光熱アクチュエータは、PTFE テープと LM/PI フィルムを組み立てることによって準備されます。 e) LM/PI/PTFE光熱アクチュエータの曲率半径と組立角度の関係。 (Wiley-VCH Verlag の許可を得て転載) この研究は画期的な進歩をさらに強化し、ガリウムベースの液体金属コンポーネントの優れた特性と能力を強調しています。 これらの材料は、高い電気伝導性および熱伝導性と、低粘度の液体の流動性を独自にバランスさせています。 原子的に薄い酸化物層を形成する能力により、安全で耐久性のある用途に不可欠な無毒性と耐酸化性が保証されます。 ポリマーフィルムへのこの革新的な統合により、基材の柔軟性を維持するだけでなく、大幅な光熱応答性も追加される複合材料が得られます。 印象的なことに、実験結果はこれらの材料の堅牢性と効率性を強調しています。 液体金属を注入した積層板は、物体を自重の 48 倍まで持ち上げることが実証されており、その驚くべき強度が実証されています。 さらに、その耐久性は、2000 時間以上の連続動作に相当する XNUMX 回の動作サイクルにわたって一貫したパフォーマンスによって証明されています。 この強度と耐久性の組み合わせは、ソフトロボット工学の分野における大きな進歩を示し、高機能で多用途のロボットシステムの新時代を約束します。 ソフトロボット工学の永続的な課題は、自然な筋肉の多用途性に適合するアクチュエータを見つけることです。 形状記憶合金やポリマーなどの材料は、加熱すると成形形状を取り戻しますが、一時的な形状には永続性がありません。 ハイドロゲル 液晶エラストマーは膨潤と分子の秩序化によって持続的な構造を作り出すことができますが、これらの遷移は一方向である傾向があります。 また、モーターやバッテリーなどの硬いコンポーネントを統合しようとすると、ソフト システムの重要な利点が無効になります。 ハード要素なしで複雑な可逆動作をプログラミングすることの難しさにより、進歩が妨げられてきました。
幸いなことに、最近のいくつかの進歩により、ソフトロボティクスが新たな画期的な試みに向けて準備が整いました。 ガリウムベースの液体金属は、高い電気伝導性および熱伝導性と、低粘度流体の流動性を独自に組み合わせています。 その異常な特性は、非毒性を与え、さらなる酸化を抑制し、形状保持に十分な表面張力を提供する、原子的に薄い酸化ガリウムの皮膜が容易に形成されることに由来します。
研究者らは最近、この自発的に形成される界面活性剤により、マイクロスケールの液体金属液滴を柔軟なポリマーフィルムに組み込むことができることを発見しました。 得られた複合材料はホストの弾性を維持しながら、光熱機能を獲得します。 言い換えれば、光に反応して動くように訓練することができるのです。
最新の研究では、信じられないほど多様な持続的かつ可逆的な構成を液体金属が埋め込まれたポリマーストリップにプログラムできることが実証されました。 研究チームは、賢明なソリューションのおかげで生物インスピレーションが得られたと考えています。 研究者らは、刺激を受けると収縮して曲がるように設計された外側の「原形質」テープでストリップを重ねることにより、つる植物のとぐろを巻く蔓を再現した。 この二重層構造は、つるの蔓が成長するにつれて支柱に向かってねじれる特定の細胞活動を模倣しています。
研究者らは、慎重なラミネート製造と戦略的なレーザー加熱を通じて、らせん状にしっかりとカールしたり、ゆっくりと曲げて開いたり、状態間をスムーズに移行したりできるフィルムを製造し、再び変形するよう促されるまでそれぞれの形状を維持しました。
複雑なパターンを印刷し、フィルムの向きや成分比などのラミネートパラメータを調整することで、チームは事前にプログラム可能なモーションの驚くべきパレットを作成しました。 同社の液体金属ソリューションは、うねる、歩く、つかむ、泳ぐなどの複雑なタスクに合わせたソフト マシンの迅速なプロトタイピングを可能にします。
適応性を実証するために、研究者らは、物体を持ち上げ、物体を持ち上げ、再び下ろすという順番で手を伸ばし、閉じて物体を持ち上げる爪のついたアームを構築した。 このような巧みな操作は、従来のソフトロボットでは依然として不可能です。 これらの優れた機能は、形状を固定するサポートストリップと、目的を持った配置で取り付けられた原形質のような収縮層の生体からインスピレーションを得た組み合わせから生まれます。
この研究は、強力かつ機敏な特殊なソフト ロボットの刺激的な青写真を提供します。 研究チームは、液体金属ラミネートが重量の 48 倍の物体を持ち上げることができ、2000 回の移動サイクル後 (連続 XNUMX 時間以上) に確実に動作することを確認しました。 このような弾性は高性能ポリマー成分から生じ、埋め込まれた液体金属粒子が十分な熱と堅牢な接着に貢献します。 これらの特性を組み合わせることで、ソフト ロボット工学を悩ませている堅牢性の制限を最終的に突破できる可能性があります。
著者らはまた、レーザー入力に応じた積層板の曲がりを正確に予測する計算モデルを定式化しました。 このシミュレーション ツールを使用すると、ソフトウェア プロトタイプを介してカスタム動作を設計し、製造前に必要な物理パラメータをプレビューすることができます。
この合理化されたアプローチを通じて、研究者らは、光を利用したアメンボ、尺取虫、蝶の羽ばたきなどの独自の適応を迅速に思いつき、反復することができました。 より複雑な移動、操作、ジェスチャーを想像して現実にできるようになりました。
この研究は、自然の理解とテクノロジーの進歩による相乗効果がどのようにイノベーションを促進できるかを浮き彫りにしています。 研究者らは、進化を通じて完成された適応的な生物学的プロセスをエミュレートし、最新のナノ加工と計算手法を使用して動的な液体金属ベースのアクチュエーターを作成しました。
この作品は、現実世界の混乱をより適切に処理できるカスタマイズ可能なソフトロボットを約束します。 材料と製造技術は、低い複雑さで高い自由度を提供するため、高度に統合された応答デバイスのプロトタイピングが新たに容易になる可能性があります。
これらの液体金属の「筋肉」は、いつか亀裂をすり抜ける機敏な捜索救助ヘビ、打撲傷を防ぐ穏やかな作物摘みグリッパー、人間の動作をガイドする直感的なウェアラブルトレーナー、および適応性を必要とする同様の用途に動力を与える可能性があります。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- PlatoData.Network 垂直生成 Ai。 自分自身に力を与えましょう。 こちらからアクセスしてください。
- プラトアイストリーム。 Web3 インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- プラトンESG。 カーボン、 クリーンテック、 エネルギー、 環境、 太陽、 廃棄物管理。 こちらからアクセスしてください。
- プラトンヘルス。 バイオテクノロジーと臨床試験のインテリジェンス。 こちらからアクセスしてください。
- 情報源: https://www.nanowerk.com/news2/robotics/newsid=64186.php

