15年2023月XNUMX日(Nanowerkニュース) 3D インクジェット プリンティング システムを使用すると、エンジニアは、重い物体を掴むのに十分な強度を持ちながら、人間と安全に対話できるほど十分に柔らかいロボット グリッパーなど、柔らかいコンポーネントと硬いコンポーネントを備えたハイブリッド構造を製造できます。 これらのマルチマテリアル 3D プリンティング システムは、数千のノズルを利用して樹脂の小さな液滴を堆積し、スクレーパーまたはローラーで滑らかにし、UV 光で硬化します。 しかし、平滑化プロセスでは、硬化が遅い樹脂を押しつぶしたり汚したりする可能性があり、使用できる材料の種類が制限されます。 MIT、MIT のスピンアウト Inkbit、ETH Zurich の研究者は、より広範囲の材料に対応する新しい 3D インクジェット プリンティング システムを開発しました。 同社のプリンターはコンピューター ビジョンを利用して 3D 印刷面を自動的にスキャンし、各ノズルが堆積する樹脂の量をリアルタイムで調整して、材料が多すぎたり少なすぎたりする領域がないようにします。
 このレンダリングでは、新しいプロセスを使用してレイヤーごとにロボットが構築されている様子が示されています。 黒い球は、プリンターが使用するマテリアルを表します。 次に、材料は UV 光によって硬化されます (青色で表示)。 画像の上部には、手順をスキャンし、それに応じて調整するカメラがあります。 (画像: Moritz Hocher) この非接触システムは、樹脂を平滑化するために機械部品を必要としないため、従来 3D プリンティングで使用されていたアクリレートよりも硬化が遅い材料でも使用できます。 一部の硬化が遅い材料化学は、弾性、耐久性、寿命の向上など、アクリレートよりも優れた性能を提供できます。 さらに、自動システムは印刷プロセスを停止したり遅くしたりすることなく調整を行うため、このプロダクショングレードのプリンターは、同等の 660D インクジェット印刷システムよりも約 3 倍高速になります。 研究者らはこのプリンターを使用して、柔らかい素材と硬い素材を組み合わせた複雑なロボットデバイスを作成しました。 たとえば、彼らは完全に 3D プリントで人間の手のような形状をしたロボット グリッパーを作成し、強化されながらも柔軟な一連の腱によって制御しました。
このレンダリングでは、新しいプロセスを使用してレイヤーごとにロボットが構築されている様子が示されています。 黒い球は、プリンターが使用するマテリアルを表します。 次に、材料は UV 光によって硬化されます (青色で表示)。 画像の上部には、手順をスキャンし、それに応じて調整するカメラがあります。 (画像: Moritz Hocher) この非接触システムは、樹脂を平滑化するために機械部品を必要としないため、従来 3D プリンティングで使用されていたアクリレートよりも硬化が遅い材料でも使用できます。 一部の硬化が遅い材料化学は、弾性、耐久性、寿命の向上など、アクリレートよりも優れた性能を提供できます。 さらに、自動システムは印刷プロセスを停止したり遅くしたりすることなく調整を行うため、このプロダクショングレードのプリンターは、同等の 660D インクジェット印刷システムよりも約 3 倍高速になります。 研究者らはこのプリンターを使用して、柔らかい素材と硬い素材を組み合わせた複雑なロボットデバイスを作成しました。 たとえば、彼らは完全に 3D プリントで人間の手のような形状をしたロボット グリッパーを作成し、強化されながらも柔軟な一連の腱によって制御しました。
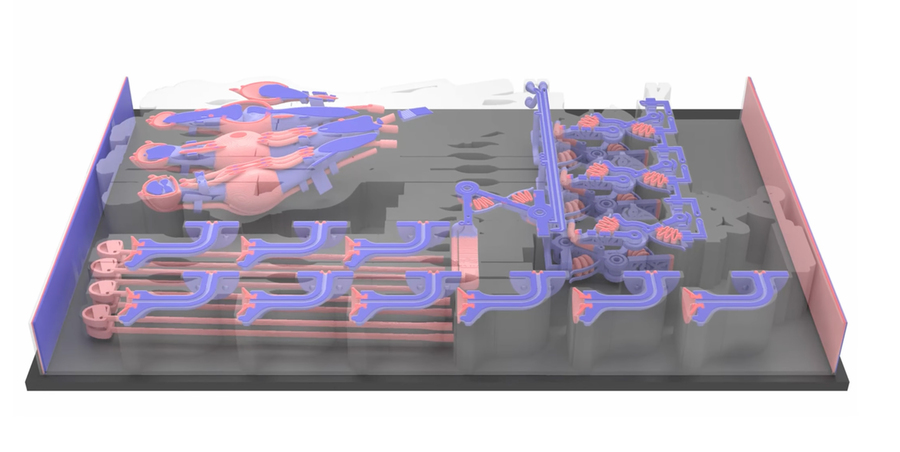 研究者らは、印刷システムを使用して、柔らかい材料と硬い材料を組み合わせた複雑なロボットデバイスを作成しました。 プリンターには 16,000 個のノズルがあるため、システムは製造中のデバイスの詳細を制御できます。 このレンダリングでは、プリンターによって途中まで構築されたオブジェクトが表示されます。 (画像提供:研究者) 「幾何学的には、複数の素材で作られたほぼすべてのものを印刷できます。 プリンターに送信できるものにはほとんど制限がなく、得られるものは本当に機能的で長持ちします」とカッツシュマン氏は言います。 システムによって提供される制御レベルにより、物体の内部に空洞やチャネルの複雑なネットワークを作成するための支持材として使用されるワックスを非常に正確に印刷することができます。 ワックスは、デバイスの製造時に構造の下に印刷されます。 完成後、物体が加熱されるとワックスが溶けて流れ出し、物体全体に開いた溝が残ります。 各ノズルによって堆積される材料の量をリアルタイムで自動的かつ迅速に調整できるため、システムは印刷面を水平に保つために機械部品を印刷面上で引きずる必要がありません。 これにより、プリンターはよりゆっくりと硬化し、スクレーパーで汚れてしまうような材料を使用できるようになります。
研究者らは、印刷システムを使用して、柔らかい材料と硬い材料を組み合わせた複雑なロボットデバイスを作成しました。 プリンターには 16,000 個のノズルがあるため、システムは製造中のデバイスの詳細を制御できます。 このレンダリングでは、プリンターによって途中まで構築されたオブジェクトが表示されます。 (画像提供:研究者) 「幾何学的には、複数の素材で作られたほぼすべてのものを印刷できます。 プリンターに送信できるものにはほとんど制限がなく、得られるものは本当に機能的で長持ちします」とカッツシュマン氏は言います。 システムによって提供される制御レベルにより、物体の内部に空洞やチャネルの複雑なネットワークを作成するための支持材として使用されるワックスを非常に正確に印刷することができます。 ワックスは、デバイスの製造時に構造の下に印刷されます。 完成後、物体が加熱されるとワックスが溶けて流れ出し、物体全体に開いた溝が残ります。 各ノズルによって堆積される材料の量をリアルタイムで自動的かつ迅速に調整できるため、システムは印刷面を水平に保つために機械部品を印刷面上で引きずる必要がありません。 これにより、プリンターはよりゆっくりと硬化し、スクレーパーで汚れてしまうような材料を使用できるようになります。
 写真には、白い 3D プリントされたさまざまなオブジェクトがトレイに並べられています。 オブジェクトは、ロボットハンド、格子構造で作られた立方体、生体心臓、歩行ロボットです。 (画像提供:研究者) 研究チームはまた、統合された心室と人工心臓弁を備えた心臓のようなポンプや、非線形の材料特性を持つようにプログラムできるメタマテリアルを通じてこの技術を紹介しました。 「これは単なる始まりです。 このテクノロジーに追加できる新しいタイプのマテリアルは驚くほどたくさんあります。 これにより、これまで 3D プリントでは使用できなかったまったく新しいマテリアル ファミリを導入できるようになりました」と Matusik 氏は言います。 研究者らは現在、このシステムを使用して組織工学用途で使用されるヒドロゲルのほか、シリコン材料、エポキシ、特殊なタイプの耐久性ポリマーを印刷することを検討している。 また、カスタマイズ可能な医療機器、半導体研磨パッド、さらに複雑なロボットの印刷など、新しい応用分野の開拓も望んでいます。
写真には、白い 3D プリントされたさまざまなオブジェクトがトレイに並べられています。 オブジェクトは、ロボットハンド、格子構造で作られた立方体、生体心臓、歩行ロボットです。 (画像提供:研究者) 研究チームはまた、統合された心室と人工心臓弁を備えた心臓のようなポンプや、非線形の材料特性を持つようにプログラムできるメタマテリアルを通じてこの技術を紹介しました。 「これは単なる始まりです。 このテクノロジーに追加できる新しいタイプのマテリアルは驚くほどたくさんあります。 これにより、これまで 3D プリントでは使用できなかったまったく新しいマテリアル ファミリを導入できるようになりました」と Matusik 氏は言います。 研究者らは現在、このシステムを使用して組織工学用途で使用されるヒドロゲルのほか、シリコン材料、エポキシ、特殊なタイプの耐久性ポリマーを印刷することを検討している。 また、カスタマイズ可能な医療機器、半導体研磨パッド、さらに複雑なロボットの印刷など、新しい応用分野の開拓も望んでいます。
このレンダリングでは、新しいプロセスを使用してレイヤーごとにロボットが構築されている様子が示されています。 黒い球は、プリンターが使用するマテリアルを表します。 次に、材料は UV 光によって硬化されます (青色で表示)。 画像の上部には、手順をスキャンし、それに応じて調整するカメラがあります。 (画像: Moritz Hocher) この非接触システムは、樹脂を平滑化するために機械部品を必要としないため、従来 3D プリンティングで使用されていたアクリレートよりも硬化が遅い材料でも使用できます。 一部の硬化が遅い材料化学は、弾性、耐久性、寿命の向上など、アクリレートよりも優れた性能を提供できます。 さらに、自動システムは印刷プロセスを停止したり遅くしたりすることなく調整を行うため、このプロダクショングレードのプリンターは、同等の 660D インクジェット印刷システムよりも約 3 倍高速になります。 研究者らはこのプリンターを使用して、柔らかい素材と硬い素材を組み合わせた複雑なロボットデバイスを作成しました。 たとえば、彼らは完全に 3D プリントで人間の手のような形状をしたロボット グリッパーを作成し、強化されながらも柔軟な一連の腱によって制御しました。
[埋め込まれたコンテンツ]
「ここでの私たちの重要な洞察は、マシンビジョン システムと完全にアクティブなフィードバック ループを開発することでした。 これは、プリンターに目と脳を与えるようなもので、目が印刷されているものを観察し、次に何を印刷すべきかを機械の脳が指示するのです」と共催著者のヴォイチェフ・マトゥシク氏は言う。 、MIT の電気工学およびコンピューター サイエンスの教授であり、MIT コンピューター サイエンスおよび人工知能研究所 (CSAIL) 内の計算設計および製造グループを率いています。 同論文には、筆頭著者でチューリッヒ工科大学の博士課程学生であるトーマス・ブフナー氏、共対応著者であるチューリッヒ工科大学ソフトロボティクス研究室を率いるロボット工学助教授のロバート・カッツシュマン博士(18年)が参加している。 チューリッヒ工科大学やインクビットの他の大学も同様です。 この研究は今日、 自然 (「複合システムとロボットのための視覚制御ジェッティング」).連絡不要
この論文は、研究者らが 3 年に導入した MultiFab として知られる低コストのマルチマテリアル 2015D プリンタを基に構築されています。MultiFab は、数千のノズルを利用して UV 硬化された樹脂の小さな液滴を堆積することで、最大 3 個の高解像度 10D プリンティングを可能にしました。材料を一気に。 この新しいプロジェクトで、研究者らは、より複雑なデバイスの製造に使用できる材料の範囲を拡大する非接触プロセスを模索しました。 彼らは、16,000 台の高フレームレート カメラと XNUMX 台のレーザーを利用して印刷面を高速かつ連続的にスキャンする、ビジョン制御ジェッティングとして知られる技術を開発しました。 カメラは、数千のノズルが樹脂の小さな液滴を堆積する様子を画像にキャプチャします。 コンピューター ビジョン システムは、画像を高解像度の深度マップに変換します。この計算の実行には XNUMX 秒もかかりません。 深度マップを製造中の部品の CAD (コンピューター支援設計) モデルと比較し、堆積される樹脂の量を調整して、オブジェクトを最終構造で目標どおりに保ちます。 自動システムは個々のノズルを調整できます。 プリンターには XNUMX 個のノズルがあるため、システムは製造中のデバイスの詳細を制御できます。
研究者らは、印刷システムを使用して、柔らかい材料と硬い材料を組み合わせた複雑なロボットデバイスを作成しました。 プリンターには 16,000 個のノズルがあるため、システムは製造中のデバイスの詳細を制御できます。 このレンダリングでは、プリンターによって途中まで構築されたオブジェクトが表示されます。 (画像提供:研究者) 「幾何学的には、複数の素材で作られたほぼすべてのものを印刷できます。 プリンターに送信できるものにはほとんど制限がなく、得られるものは本当に機能的で長持ちします」とカッツシュマン氏は言います。 システムによって提供される制御レベルにより、物体の内部に空洞やチャネルの複雑なネットワークを作成するための支持材として使用されるワックスを非常に正確に印刷することができます。 ワックスは、デバイスの製造時に構造の下に印刷されます。 完成後、物体が加熱されるとワックスが溶けて流れ出し、物体全体に開いた溝が残ります。 各ノズルによって堆積される材料の量をリアルタイムで自動的かつ迅速に調整できるため、システムは印刷面を水平に保つために機械部品を印刷面上で引きずる必要がありません。 これにより、プリンターはよりゆっくりと硬化し、スクレーパーで汚れてしまうような材料を使用できるようになります。
優れた素材
研究者らは、このシステムを使用して、3D プリンティングで使用される従来のアクリル材料よりも硬化が遅いチオールベースの材料で印刷しました。 ただし、チオールベースの材料は弾力性があり、アクリレートほど簡単には壊れません。 また、より広い温度範囲で安定する傾向があり、日光にさらされてもすぐには劣化しません。 「これらは、現実世界の環境と対話する必要があるロボットやシステムを製造する場合、非常に重要な特性です」とカッツシュマン氏は言います。 研究者らは、チオールベースの材料とワックスを使用して、既存の 3D プリンティング システムで製造するのがほぼ不可能ないくつかの複雑なデバイスを製造しました。 その一例として、独立して作動可能な 19 本の腱、センサー パッドを備えた柔らかい指、および耐荷重性の高い骨を備えた機能的な腱駆動型ロボット ハンドを開発しました。 「私たちはまた、物体を感知して掴むことができるXNUMX本足歩行ロボットも製作しました。これは、軟質材料と剛体材料の気密な界面と構造内部の複雑なチャネルを作成するシステムの能力のおかげで可能でした」とブフナー氏は述べています。
写真には、白い 3D プリントされたさまざまなオブジェクトがトレイに並べられています。 オブジェクトは、ロボットハンド、格子構造で作られた立方体、生体心臓、歩行ロボットです。 (画像提供:研究者) 研究チームはまた、統合された心室と人工心臓弁を備えた心臓のようなポンプや、非線形の材料特性を持つようにプログラムできるメタマテリアルを通じてこの技術を紹介しました。 「これは単なる始まりです。 このテクノロジーに追加できる新しいタイプのマテリアルは驚くほどたくさんあります。 これにより、これまで 3D プリントでは使用できなかったまったく新しいマテリアル ファミリを導入できるようになりました」と Matusik 氏は言います。 研究者らは現在、このシステムを使用して組織工学用途で使用されるヒドロゲルのほか、シリコン材料、エポキシ、特殊なタイプの耐久性ポリマーを印刷することを検討している。 また、カスタマイズ可能な医療機器、半導体研磨パッド、さらに複雑なロボットの印刷など、新しい応用分野の開拓も望んでいます。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- PlatoData.Network 垂直生成 Ai。 自分自身に力を与えましょう。 こちらからアクセスしてください。
- プラトアイストリーム。 Web3 インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- プラトンESG。 カーボン、 クリーンテック、 エネルギー、 環境、 太陽、 廃棄物管理。 こちらからアクセスしてください。
- プラトンヘルス。 バイオテクノロジーと臨床試験のインテリジェンス。 こちらからアクセスしてください。
- 情報源: https://www.nanowerk.com/news2/gadget/newsid=64061.php

