中国の研究チームは、新しい磁気コイル状の「マイクロファイバーボット」を開発し、ウサギの動脈出血の塞栓形成に使用した。これにより、動脈瘤や脳腫瘍に対する一連の制御可能で低侵襲性の治療法への道が開かれた。
動脈瘤の出血を止めたり、脳腫瘍への血流を止めたりする場合(塞栓として知られるプロセス)、外科医は通常、大腿動脈に細いカテーテルを通し、血管内をナビゲートして塞栓剤を送達します。これらのカテーテルは広く使用されていますが、複雑な血管網を通過するのは困難です。
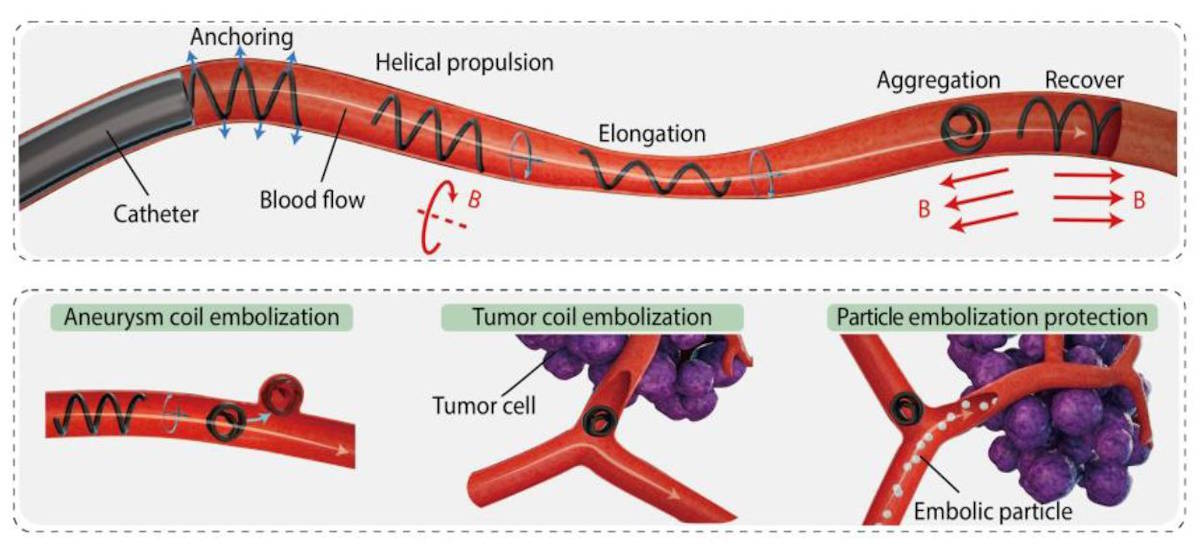
この課題に対処する取り組みとして、華中科技大学の研究者チーム (ハスト)は、そのような手順を遠隔で実行できる小さな磁気を帯びた柔らかいマイクロファイバーボットを作成しました。このデバイスは、磁化された繊維をらせん状にねじって作られており、さまざまなサイズの血管に適合し、外部磁場にさらされるとコルク抜きのように動くことができます。研究結果は、 科学ロボット工学では、デバイスを使用してウサギの動脈出血を止めることがどのように成功したかを示します。
共著者として ジャンフェン マイクロファイバーロボットは、熱エネルギーを使用して磁性軟複合材料をマイクロファイバーに引き込み、その後「磁化され、螺旋状の磁気極性を与えるように成形される」ことによって作られている、と同氏は説明する。磁場を制御することにより、磁性ソフトマイクロファイバーロボットは可逆的な形態変化(伸長または凝集)と血流(上流と下流の両方)による螺旋推進を実証しました。これにより、複雑な血管系をナビゲートし、サブミリメートル領域でロボットによる塞栓術を実行できるようになります。
「この記事は私たちがどのようにパフォーマンスしたかを示しています ビトロ 神経血管モデルで動脈瘤と腫瘍の塞栓形成を行い、リアルタイム透視下でロボットナビゲーションと塞栓形成を実行しました。 インビボの ウサギの大腿動脈モデルです」と Zang 氏は言います。 「これらの実験は、この研究の潜在的な臨床的価値を実証し、将来のロボット支援による塞栓手術の選択肢への道を開きます。」
アンカリング機能
筆頭著者で HUST の博士課程学生である Xurui Liu 氏によると、各マイクロファイバーボットは血管ステントと同様の固定機能を備えており、接触摩擦によって血管の内壁に安定して固定され、血管によって流されないようにすることができます。血流。
「その螺旋状の磁化分布により、マイクロファイバー ロボットに中心軸に沿った正味の磁化方向が与えられます。正味の磁化方向と一致する外部磁場を印加することで、ロボットを伸ばすことができます」と彼女は言います。
「逆に、外部磁場が正味磁化の方向と逆の場合、ロボットは集合します」と彼女は付け加えました。 「このマイクロファイバーロボットの柔らかさと高い堅牢性により、その形態学的再構成機能は、1,000 回を超える凝集と伸長サイクルの後でも完全に可逆性を維持します。」
有望な代替案
以前の研究で報告された磁性ソフトロボットとは対照的に、新しいロボットの螺旋磁化方向特性により、制御磁場とは無関係にロボットの変形および動作モードを直交的に切り離すことができ、「独自の磁場制御の柔軟性」が得られることをザン教授は確認している。
「この機能により、単一のマイクロファイバー ロボットが回転磁場の作用下で血流に逆らって高速で移動できるだけでなく、複数のマイクロファイバー ロボットの形状と動きを独立して制御することも可能になります」と Zang 氏は説明します。
「さらに、これらのデバイスは一般的に使用される介入カテーテルと互換性があり、臨床現場での使用の可能性を最大限に高めます」と彼は付け加えました。
カテーテルベースの塞栓術などの従来の方法の課題、特に操作上の限界と精度不足、および医師が長時間放射線にさらされることによる健康リスク(X線ガイダンスによる)に直面しているシステム) – Zang 氏は、磁気マイクロファイバーボット技術の開発により、臨床医が既存の治療を改善する新しい手段を提供できると指摘しています。

幹細胞治療用の磁気マイクロロボットがラインナップ
「マイクロファイバーボットの開発は、血管塞栓治療に新たな視点を提供し、低侵襲外科治療技術への応用の可能性を示しています。この技術は、血流閉塞を正確に制御することにより、従来のカテーテル塞栓技術を効果的に補完または代替するものです」と彼は言います。
Zang 氏は、この技術には可能性があるものの、臨床応用までにはまだ克服すべき課題があると述べています。これらには、マイクロファイバーボットの構造の最適化、材料の生体適合性の向上、血管の位置決めおよび追跡システムの開発が含まれます。 「研究チームは、テクノロジーの応用を進めるために、これらの重要な問題に対処するために取り組んでいます」と彼は付け加えた。
- SEO を活用したコンテンツと PR 配信。 今日増幅されます。
- PlatoData.Network 垂直生成 Ai。 自分自身に力を与えましょう。 こちらからアクセスしてください。
- プラトアイストリーム。 Web3 インテリジェンス。 知識増幅。 こちらからアクセスしてください。
- プラトンESG。 カーボン、 クリーンテック、 エネルギー、 環境、 太陽、 廃棄物管理。 こちらからアクセスしてください。
- プラトンヘルス。 バイオテクノロジーと臨床試験のインテリジェンス。 こちらからアクセスしてください。
- 情報源: https://physicsworld.com/a/magnetic-microbots-show-promise-for-treating-aneurysms-and-brain-tumours/

