Ett team av forskare i Kina har utvecklat nya "mikrofiberbots" med magnetspolning och använt dem för att embolisera arteriell blödning hos en kanin – vilket banar väg för en rad kontrollerbara och mindre invasiva behandlingar för aneurysm och hjärntumörer.
När man försöker stoppa blödning i aneurysm eller stoppa flödet av blod till hjärntumörer (en process som kallas embolisering), kör kirurger i allmänhet en smal kateter genom lårbensartären och navigerar den genom blodkärlen för att tillföra emboliska medel. Även om de används i stor utsträckning är dessa katetrar svåra att styra genom komplexa kärlnätverk.
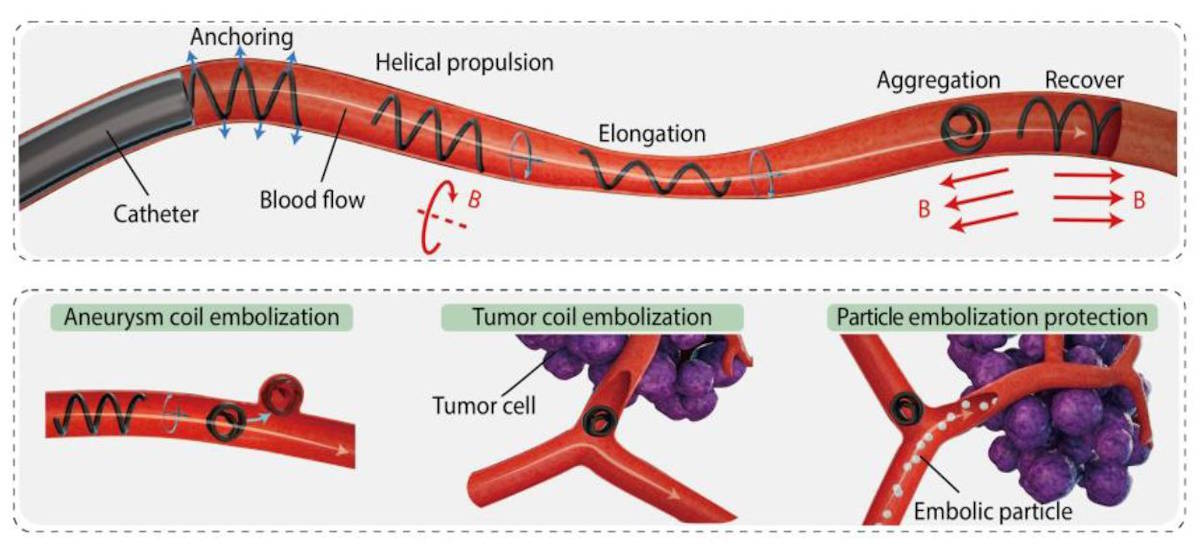
I ett försök att möta denna utmaning har ett team av forskare vid Huazhong University of Science and Technology (HUST) skapade små magnetiska, mjuka mikrofiberbotar som kan utföra sådana procedurer på distans. Enheterna, gjorda av en magnetiserad fiber vriden till en spiralform, kan passa en rad olika kärlstorlekar och röra sig på ett korkskruvssätt när de utsätts för ett externt magnetfält. Resultaten av forskningen, presenterade i Science Robotics, visa hur enheterna framgångsrikt användes för att stoppa arteriell blödning hos en kanin.
Som medförfattare Jianfeng Zhang förklarar att mikrofiberbottarna tillverkas genom att använda termisk energi för att dra magnetiska mjuka kompositmaterial till mikrofibrer, som sedan "magnetiseras och formas för att ge dem spiralformad magnetisk polaritet". Genom att kontrollera magnetfältet visade den magnetiska mjuka mikrofiberroboten reversibel morfologisk transformation (förlängning eller aggregation) och spiralframdrivning genom blodflödet (både uppströms och nedströms). Detta gör att den kan navigeras genom komplexa kärlsystem och utföra robotembolisering i sub-millimeterområdet.
”Artikeln visar hur vi presterade vitro embolisering av aneurysm och tumörer i en neurovaskulär modell, och utförde robotisk navigering och embolisering under realtidsfluoroskopi i en in vivo- kanin lårbensartärmodell”, säger Zang. "Dessa experiment visar det potentiella kliniska värdet av detta arbete och banar väg för framtida robotassisterad emboliseringskirurgi."
Förankringsfunktion
Enligt första författaren Xurui Liu, doktorand vid HUST, har varje mikrofiberbot en förankringsfunktion som liknar den hos en vaskulär stent, vilket gör att den kan förankras stabilt till blodkärlens innervägg genom kontaktfriktion för att undvika att sköljas bort av blodflödet.
"Dess spiralformade magnetiseringsfördelning ger mikrofiberroboten en nettomagnetiseringsriktning längs sin centrala axel. Genom att applicera ett externt magnetfält som överensstämmer med riktningen för nettomagnetiseringsriktningen kan roboten förlängas, säger hon.
"Omvänt, när det externa magnetfältet är motsatt riktningen för nettomagnetisering, kommer roboten att samlas," tillägger hon. "Den här mikrofiberrobotens mjukhet och höga robusthet säkerställer att dess morfologiska rekonstruktionsfunktion förblir helt reversibel efter mer än tusen aggregerings- och förlängningscykler."
Lovande alternativ
I motsats till de magnetiska mjuka robotarna som rapporterats i tidigare forskning, bekräftar Zang att de spiralformade magnetiseringsriktningsegenskaperna hos de nya robotarna gör att deras deformations- och rörelselägen kan frikopplas ortogonalt oberoende av kontrollmagnetfältet, vilket ger "unik magnetfältstyrningsflexibilitet".
"Denna funktion tillåter inte bara en enskild mikrofiberrobot att röra sig med hög hastighet mot blodflödet under påverkan av ett roterande magnetfält, utan möjliggör också oberoende kontroll av formen och rörelsen hos flera mikrofiberbotar", förklarar Zang.
"Dessutom är dessa enheter kompatibla med vanliga interventionskatetrar för att maximera deras potential för användning i kliniska miljöer," tillägger han.
Inför utmaningarna med traditionella metoder som kateterbaserad embolisering – särskilt när det gäller deras operationella begränsningar och otillräckliga precision, samt hälsoriskerna med att läkare utsätts för strålning under långa perioder (från röntgenvägledningen) system) – Zang påpekar att utvecklingen av magnetisk mikrofiberbotteknik ger kliniker ett nytt sätt att förbättra befintliga behandlingar.

Magnetiska mikrorobotar ställer upp för stamcellsterapi
"Utvecklingen av mikrofiberbots ger ett nytt perspektiv för vaskulär emboliseringsbehandling och visar användningspotential inom minimalinvasiv kirurgisk behandlingsteknologi. Denna teknik ger ett effektivt komplement eller alternativ till traditionell kateteremboliseringsteknik genom att exakt kontrollera blodflödesocklusionen, säger han.
Zang noterar att även om denna teknologi visar potential, finns det fortfarande utmaningar att övervinna innan den börjar tillämpas kliniskt. Dessa inkluderar strukturell optimering av mikrofiberbots, ökad biokompatibilitet hos material och utveckling av blodkärlspositionering och spårningssystem. "Forskargruppen arbetar med att ta itu med dessa nyckelfrågor för att främja tillämpningen av tekniken," tillägger han.
- SEO-drivet innehåll och PR-distribution. Bli förstärkt idag.
- PlatoData.Network Vertical Generative Ai. Styrka dig själv. Tillgång här.
- PlatoAiStream. Web3 Intelligence. Kunskap förstärkt. Tillgång här.
- Platoesg. Kol, CleanTech, Energi, Miljö, Sol, Avfallshantering. Tillgång här.
- PlatoHealth. Biotech och kliniska prövningar Intelligence. Tillgång här.
- Källa: https://physicsworld.com/a/magnetic-microbots-show-promise-for-treating-aneurysms-and-brain-tumours/

