Netwerken in voertuigen beginnen te migreren van domeinarchitecturen naar zonale architecturen, een aanpak die de communicatie in een voertuig zal vereenvoudigen en versnellen met minder protocollen, minder bedrading en uiteindelijk lagere kosten.
Zonale architecturen zullen voertuigen verdelen in zones die beter beheersbaar en flexibeler zijn, maar het zal tijd kosten om daar te komen. Er zit tegenwoordig zoveel verouderde technologie in voertuigen dat autofabrikanten een alfabetische verzameling protocollen moeten ondersteunen. Voertuigen kunnen bijvoorbeeld Bluetooth, USB en LTE ondersteunen, mobiele apparaten ondersteunen voor infotainment, samen met enkele intern ontwikkelde protocollen. Voor camera's is MIPI het overheersende protocol. En voor realtime controle van ADAS, ECU's en sensorfusie zullen ze waarschijnlijk ondersteuning bieden controller area-netwerken (CAN's), lokale interconnect-netwerken (LIN's), Ethernet en andere.
Een van de belangrijkste elementen om deze verschuiving mogelijk te maken is snellere communicatie. Enkele jaren geleden draaide 93% van de autonetwerken op snelheden van minder dan 100 Mbps, en veel daarvan zal waarschijnlijk niet van de ene op de andere dag veranderen. Het is zelfs waarschijnlijk dat 10/100/1000BASE-T1 Automotive-ethernet en langzame bussen, zoals CAN en zijn varianten, zullen de meeste langzame communicatie blijven verzorgen. Maar in de loop van de tijd zullen er multi-gigabitsnelheden aan voertuigen worden toegevoegd voor een snelle verplaatsing van gegevens, naarmate auto's meer consequente beslissingen gaan nemen op basis van input uit de verschillende zones.
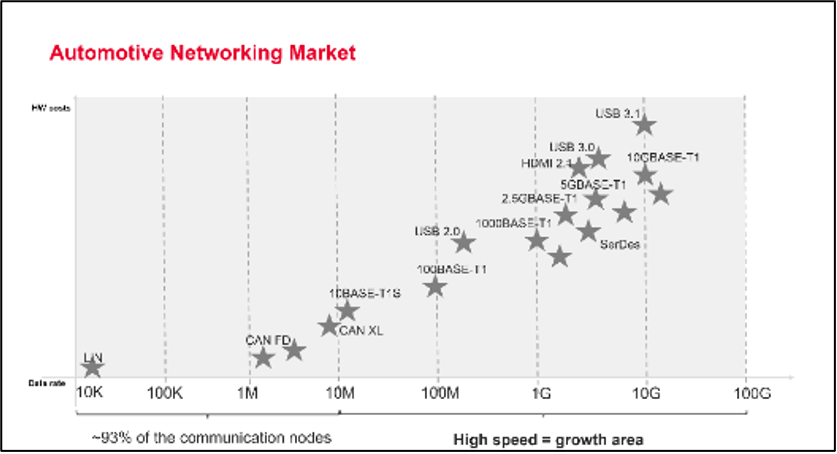
Fig. 1: Vergelijking van verschillende soorten autonetwerktechnologieën. Bron: Keysight
“De auto-industrie verwacht dat Automotive Ethernet niet alle bestaande connectiviteit zal vervangen”, zegt Jae Yong, oplossingsarchitect en planner voor Automotive Ethernet-technologieën bij Keysight Technologies. “In plaats daarvan zullen we een mix van verschillende communicatieprotocollen en -methoden blijven zien. De gigantische sterrenhoop rechtsboven in Figuur 1 is het meest dynamisch en het is de plek waar veel innovatie plaatsvindt. Zoals we uit de natuurkunde weten, verhogen hogere baudsnelheden de elektrische interferentie, ruisbronnen, reflecties, verzwakkingen en andere verliezen die van invloed zijn op signalen en de gegevens die in die signalen worden overgedragen. Hoe sneller de datasnelheden zijn, des te uitdagender en belangrijker het is om te testen vóór implementatie. We verwachten dat multi-gigabit Automotive Ethernet zal voorzien in de behoefte aan snellere communicatie op basis van IEEE 802.3ch- en IEEE 802.3cy-standaarden. Er is bijvoorbeeld een nieuwe multigigabit optische Ethernet-standaard voor auto's die onlangs is vrijgegeven door de IEEE 802.3cz-groep. Het is een interessante tijd voor netwerken in de automobielsector en we mogen veel uitdagingen en innovaties verwachten.”
Anderen zijn het daarmee eens en noemen snellere communicatie eerder een evolutionaire richting dan een alles-in-één-omschakeling. Maar de voordelen van deze verschuiving zijn niettemin aanzienlijk.
David Fritz, vice-president van hybride en virtuele systemen bij Siemens Digital Industries-software, wijst naar Automotive Ethernet als de waarschijnlijke leider op dit gebied. “De bandbreedte zal zeer binnenkort alle implementaties van L4- en L5-autonomie ondersteunen. Bovendien kunnen CAN-frames via het Ethernet-netwerk worden verzonden, waardoor gateways lokale CAN- en CAN FD-zonenetwerken kunnen beheren die bestaande ECU's ondersteunen. De gewichts- en vermogensaspecten van Automotive Ethernet zijn veel beter dan die van conventionele CAN-netwerken. Can FD ontpopt zich als een concurrent van Ethernet, en de jury weet nog steeds niet welke de overhand zal krijgen. Eén hint is echter dat we sensor-, actuator- en ECU-leveranciers zien die Automotive Ethernet rechtstreeks ondersteunen vanwege de hierboven genoemde eigenschappen.”
Automotive Ethernet is de diepgewortelde keuze. “Een van de doelstellingen hier is het vervangen van propriëtaire oplossingen, in plaats daarvan het gebruik van zoveel mogelijk gestandaardiseerde netwerktechnologieën – protocollen, controllers en PHY’s –”, zegt Robert Schweiger, groepsdirecteur automotive solutions bij Cadans. “Het verminderen van de verscheidenheid aan verschillende netwerktechnologieën om een meer homogene netwerkarchitectuur te creëren is een ander doel. Om dit te kunnen doen, moet gebruik worden gemaakt van Automotive Ethernet, bijvoorbeeld 10BASE-T1, 100BASE-T1, 1000BASE-T1, 10G BASE-T1.”
De sleutel voor zonale architecturen zal een aanzienlijke toename zijn van de algehele bandbreedte en efficiëntie van het netwerk in voertuigen, merkte Schweiger op, waarbij zonale architectuur voornamelijk afhankelijk is van Automotive Ethernet, ASA Motion-Link/MIPI A-PHY, MIPI CSI2, MIPI DSI, POF, KAN en LIN. “Natuurlijk kan dit variëren van OEM tot OEM, waarbij er nog enkele eigen oplossingen in de mix zitten.”
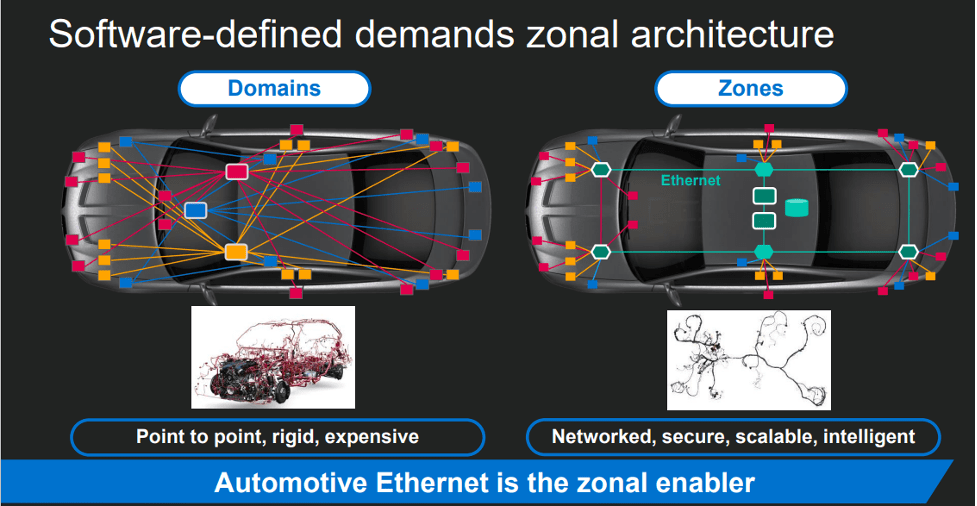
Fig. 2: Zonale architectuur vereenvoudigt de traditionele domeinbenadering. Bron: Marvell
Er verandert natuurlijk niets van de ene op de andere dag in het auto-ontwerp. Ontwerpcycli duren doorgaans minstens enkele jaren, en ontwerpen voor sommige componenten en subsystemen kunnen veel langer op de markt blijven. Als gevolg hiervan zal het autonetwerklandschap een mix blijven van protocollen en applicatie-afhankelijke schema's. Sommige zullen dienen voor niet-realtime toepassingen, zoals infotainment en monitoring van het gedrag van inzittenden in de cabine. Andere protocollen zullen veiligheid en andere real-time toepassingen ondersteunen.
“Chauffeurs worden bijvoorbeeld gewaarschuwd als kinderen of huisdieren onbeheerd worden achtergelaten als de chauffeur het voertuig verlaat”, zegt Kevin Kershner, oplossingsarchitect en planner, Automotive SerDes Technologies bij Keysight. “OEM’s werken eraan om het ontwerp van real-time applicaties te vereenvoudigen en tegelijkertijd de prestaties en communicatiesnelheid te verhogen, vooral bij autonoom rijden.”
Bovendien evolueren elektrische en elektronische (E/E) architecturen in de auto-industrie om steeds complexere eisen te ondersteunen, waaronder de rol van sensorgebaseerde rijhulpsystemen (ADAS) en toepassingen voor autonoom rijden (AD).
“In en rondom het voertuig is een overvloed aan displaytechnologie aanwezig, waaronder dashboardpanelen met hoge resolutie, zijspiegelpanelen en infotainmentopties die vergelijkbaar zijn met diensten voor elektronische apparaten voor consumenten”, aldus Kershner. “Veel sensoren, waaronder camera’s, lidar en radar, vangen de gegevens met hoge resolutie op en verzenden deze vervolgens of voegen deze samen met andere sensorgegevens voor verdere verwerking door een ADAS/AD-toepassing.”
Wat surroundview-camerasystemen betreft, kunnen meerdere camera's ook video naar beeldschermen in het voertuig sturen. “Hier zijn het de applicatievereisten die de keuze voor E/E bepalen, inclusief het totale aantal sensoren en de bandbreedte die nodig is om de gegevens over te dragen”, zei hij. “Dit betekent dat de keuze voor communicatietechnologie echt toepassingsafhankelijk is. Functies voor lage snelheden mogen geen gebruik maken van 'overontwikkelde' hogesnelheidsbussen vanwege de kosten, complexiteit en energieverbruik van apparaten met hogere snelheden. Bepaalde technologieën zijn point-to-point, terwijl andere de efficiëntie van multi-drop-nodes ondersteunen. Sommige hogesnelheidsverbindingen zijn symmetrisch en ondersteunen bidirectionele communicatie tussen krachtige rekenknooppunten. Andere zijn daarentegen ontworpen om asymmetrisch te zijn ter ondersteuning van toepassingen die een hoge doorvoersnelheid in één richting vereisen (bijvoorbeeld camera-uitvoer stroomafwaarts, commando en besturing stroomopwaarts).
Van domein- tot zonale architectuur
ECU's zijn basisbouwstenen voor voertuigen. Ze regelen verschillende functies, zoals de werking van de motor, de transmissie, het noodremmen en andere bewakingsfuncties, zoals de bandenspanning en de klimaatregeling in de cabine. In tegenstelling tot een zonale architectuur groepeert een domeinarchitectuur verschillende functies in domeinen zonder rekening te houden met de fysieke locatie van die domeinen. In domeinarchitecturen kunnen ECU's die elk domein ondersteunen, verspreid zijn in het voertuig. Als gevolg hiervan zijn mogelijk lange kabelbomen nodig om verbinding te maken met deze domeinen.
Traditioneel gebruikten OEM's domeinarchitectuur in hun ontwerpen. De primaire netwerkprotocollen die in een domeinarchitectuur worden gebruikt, zijn het controller area network (CAN) en het lokale interconnectnetwerk (LIN), die beide door OEM's zijn gebruikt om realtime controle over verschillende functies uit te voeren. CAN (ISO 11898-1:2003) is een serieel netwerkprotocol dat drie verschillende snelheden ondersteunt:
- Lage snelheid — 125 Kbps bij een buslengte van 500 meter (maximaal)
- Hoge snelheid — 1 Mbps bij een buslengte van 40 meter (maximaal)
- Flexibele datasnelheid (CAN FD) — 15 Mbps bij een buslengte van 10 meter (maximaal)
CAN is betrouwbaar en relatief goedkoop gebleken voor het ondersteunen van gedistribueerde real-time besturings- en multiplexapparatuur, inclusief ECU's. LIN (ISO 17987-2), dat CAN aanvult, is ook een serieel netwerkprotocol. Het ondersteunt een lagere datasnelheid van 19.2 Kbit/s en wordt doorgaans gebruikt voor het regelen van de cabineverlichting, zoals dimmen.
Naarmate de industrie steeds meer software en elektronica gaat integreren ter ondersteuning van softwaregedefinieerde voertuigen en autonoom rijden, neemt de vraag naar communicatie op hogere snelheid toe. Hoewel de meningen uiteenlopen, suggereren sommige experts dat toekomstig autonoom rijden dataoverdrachtssnelheden in het bereik van 50 Gbps zou vereisen om verschillende realtime ADAS- en ECU-functies te ondersteunen. Tegenwoordig is Ethernet in staat tot 100 Gbps, met het potentieel om in de komende jaren tera bits per seconde te bereiken, aldus de Ethernet Alliance.
Dit kan veranderen naarmate nieuwe technologieën en nieuwe functies zich ontwikkelen. De afgelopen jaren zijn autonetwerken verschoven van een domeingebaseerde naar een op auto-Ethernet gebaseerde zonale architectuur.
Amir Bar-Niv, vice-president marketing voor de automobielsector bij Marvell, zei dat het totale gewicht van kabelbomen in een elektrisch voertuig net achter het gewicht van een automotor en chassis ligt. Het verminderen van de lengte en het aantal kabels vermindert het totale gewicht van een voertuig, verhoogt de brandstofefficiëntie (of de actieradius in een elektrisch voertuig) en vereenvoudigt het productieproces.
Er wordt ook geprobeerd de communicatie te vereenvoudigen. Momenteel moeten individuele netwerken een scala aan bandbreedte en een verscheidenheid aan verschillende protocollen ondersteunen. ADAS zal bijvoorbeeld de noodzaak vergroten om de bandbreedte van de netwerkprotocollen te vergroten.
Draadloze communicatie kan daarbij helpen, deels omdat veel hiervan buiten de automobielsector is ontwikkeld en verfijnd. “Omdat draadloze protocollen doorgaans niet specifiek zijn voor de automobielsector, zullen ze verder worden geïntegreerd om ondersteuning voor consumentenelektronica mogelijk te maken”, zegt Bernhard Rill, directeur van Automotive Partnerships, Automotive Line of Business bij Arm uitgelegd. “In de hele sector wordt gewerkt aan het bepalen hoe deze draadloze protocollen kunnen worden gebruikt voor toekomstige autospecifieke gebruiksscenario’s. Auto’s maken tegenwoordig gebruik van een groot aantal netwerken, wat een trend in gang zet om de communicatie te consolideren. Er is een sterke focus op netwerken als het gaat om E/E-architecturen. OEM's in de automobielsector kijken naar CAN-FD en Ethernet-gebaseerde netwerken zoals 10BASE-T1S. Bovendien moet interoperabel 2.5Gbps backbone Ethernet worden versterkt voor massaproductiegebruik, en hogesnelheidsverbindingen zullen PCIe gebruiken voor coherente siliciumontwerpen.”
Zonale versus domeinarchitectuur
Het idee van zonale architectuur die gebruik maakt van sneller Ethernet wint aan kracht omdat het eenvoudiger en gemakkelijker te vervaardigen is in vergelijking met domeinarchitectuur. Deze technologische benadering maakt gebruik van meerdere zonale schakelaars om verschillende functies te besturen.
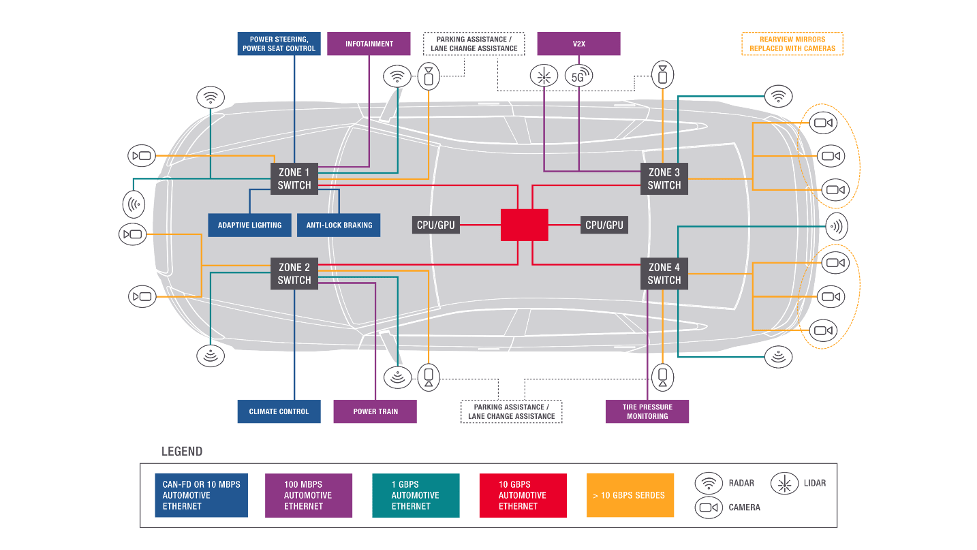
Fig. 3: Bij zonale architectuurontwerp worden meerdere zonale schakelaars met verschillende snelheden gebruikt om verschillende functies in een voertuig te besturen. Bron: Keysight
De middleware-stacks die zich tussen het besturingssysteem en de hardware bevinden, zullen steeds belangrijker worden in de zonale architectuur, en veel autonome rijfuncties zoals ADAS en noodremmen worden uitgevoerd door middleware. De kwaliteit van de dienstverlening is van cruciaal belang in middleware, inclusief de prioriteitstelling van bedrijfskritisch, realtime en tijdgevoelig verkeer boven het streamen van muziek.
Arm's Rill ziet duidelijke aanwijzingen dat de E/E-architectuur in de auto-industrie in de toekomst zal veranderen naar zonaal gebied. Hij merkte op dat Arm werkt actief met ecosysteempartners om te bepalen hoe zonale controllers kunnen worden gebruikt en welke functies daar kunnen worden gehost, inclusief ADAS en digitale cabinegerelateerde gebruiksscenario's naast lichaamstoepassingen. “Gezien de lange ontwikkelingscycli in de automobielsector zal de transitie naar zonale architectuur tijd vergen.”
De erfenisfactor
Niettemin kan de transformatie naar zonale architectuur met behulp van Ethernet, gezien veel van de oude netwerkprotocollen die momenteel door OEM's worden gebruikt, lastiger zijn dan het klinkt. Elk nieuw ontwerp zal minstens zo goed moeten functioneren als de oude, nadat de oude protocollen zijn vervangen. De echte uitdaging is het implementeren van een soepele transitie zonder gevolgen voor de introductie van nieuwe producten. Als gevolg hiervan kunnen OEM's verschillende niveaus van zonale transformatie en tijdschema's hanteren.
“De meeste toepassingen hebben een latentie- en/of payload-vereiste die de operationele aspecten van het voertuig ondersteunen, zoals real-time bediening, bijvoorbeeld LIN voor hoge latentie/lage payload, Ethernet voor lage latentie/hoge payload.”, aldus Ray Notarantonio, senior director voor de segment voertuiggebruikerservaring voor Amerika op Infineon Technologies. Over het algemeen zijn netwerken afgestemd op deze behoeften, en dit ondersteunt de beste kosten-prestatieverhouding per applicatie. Het zorgt ervoor dat netwerken door hun ontwerp niet over- of onderbenut worden.
Aan de andere kant zullen OEM's die van plan zijn over te stappen op een softwaregedefinieerde voertuigbenadering, kiezen voor een zonale architectuur. “Deze zware zonalisatie zou de introductie omvatten van een multi-Gb, hoogontwikkelde Ethernet-backbone die meer op veiligheid/beveiliging gerichte zonale modules verbindt, waardoor een volledige isolatie van systemen kan worden bereikt die dezelfde fysieke bronnen delen”, aldus Meindert van den Beld, senior vice-president en algemeen manager voor In-Vehicle Networking bij NXP.
Als zodanig hebben startups of nieuwe OEM's mogelijk meer flexibiliteit bij het adopteren van een zonale architectuur dan OEM's met oudere ontwerpen.
“De introductie van zonale architectuur is sterk afhankelijk van individuele OEM-strategieën”, zegt Sam Gold, directeur productmarketing Renesas'High Performance Computing, Analoge en Power Solutions Group. “Nieuwe spelers zijn vrijer om bestaande architecturen aan te passen, of kunnen zelfs helemaal opnieuw beginnen om nieuwe architectuurconcepten te implementeren. Aan de andere kant kunnen gevestigde OEM's te maken krijgen met sterke afhankelijkheden uit het verleden en beschikken ze over een grote verscheidenheid aan automodellen met een sterke onderlinge afhankelijkheid. Dit leidt ertoe dat alleen marginale of evolutionaire veranderingen van de netwerktopologie of architectuur kunnen worden toegepast. Het algemene doel om de kosten, de complexiteit en het gewicht van het harnas te verminderen, wordt door alle OEM's gedeeld. Ook hier is het aspect van geautomatiseerde versus handmatige fabricage van het harnas een grote kostenfactor.”
Zonale veiligheidsproblemen
Beveiliging blijft een groot probleem in de automobielsector, en hoewel een zonale architectuur in theorie gemakkelijker te controleren is, kan de transformatiefase waarin er sprake kan zijn van een combinatie van CAN, LIN, Ethernet en andere technologieën nieuwe kwetsbaarheden creëren. Dat betekent veel meer werk van OEM's om het risico op cyberaanvallen te verminderen.
“Complexiteit is de nieuwe norm nu de auto-industrie zich aanpast aan de steeds ingewikkelder wordende beeldschermen en connectiviteitseisen”, zegt Carrie Browen, productmanager autonome voertuigen bij Keysight. “Naarmate netwerken binnen het voertuig sneller en ingewikkelder worden, vereisen ze een hoger testniveau om consistente functionaliteit te garanderen. Het is niet alleen een luxe, maar ook een noodzaak om ervoor te zorgen dat elke interface beveiligd is tegen cyberdreigingen. Met meer verbindingen in de auto via CAN, Bluetooth, Automotive Ethernet, SerDes, draadloos, mobiel bijvoorbeeld, is er een grotere kans op corruptie van informatie en als een potentiële dreigingsinterface. Daarom zijn naleving van de regelgeving (ISO/SAE 21434 en UN-R155) en validatie van de netwerken zelf noodzakelijk tijdens ontwerp, validatie en productie.”
Notarantonio van Infineon was het daarmee eens. “Netwerkbeveiliging is al een aantal jaren standaard op voertuigen. Berichten worden geverifieerd met hardwarebeveiligingsmodules en speciale software in een beveiligd domein. CAN- en CAN-FD-netwerken behoorden tot de eersten die beveiliging toevoegden, en dit is sindsdien alleen maar uitgebreid. Er worden vandaag de dag keuzes gemaakt om nieuwe netwerken zoals Ethernet op voertuigen te beschermen, sommige selecteren MACSEC en andere IPSEC, maar niets blijft onbeveiligd.
Tegelijkertijd moeten autonetwerken, nu er steeds meer connectiviteit met het voertuig is, worden ontworpen met verplicht cyberbeveiligingsrisicobeheer.
“OEM's moeten een diepgaande verdediging ontwikkelen, maar ook crypto-agility mogelijk maken”, aldus Renesas' Gold. “Een diepgaande verdediging moet rekening houden met de bescherming van de externe voertuigcommunicatie (bijv. TLS, externe I/F-authenticatie) en de bescherming van de interne communicatie (bijv. IDS/IPS, TLS, MACsec, IPsec, SecOC). van de bovenstaande beschermingsmechanismen kunnen worden geanalyseerd door een voertuigbeveiligingscentrum dat, indien nodig, beveiligingspatches kan inzetten via firmware-over-the-air om de cyberbedreigingen voor de autonetwerken van het voertuig te beperken. Er moet rekening worden gehouden met de flexibiliteit van crypten ter ondersteuning van updates van autonetwerkprotocollen vanwege langere sleutellengtes en/of kapotte cryptosystemen. Post-kwantumcrypto wordt overwogen als een algoritme van de volgende generatie. Er moeten geschikte architecturen worden gedefinieerd om veiligheidsknelpunten (bijvoorbeeld gedistribueerde beveiligingsverwerking) te voorkomen.”
OEM-acceptatie
Hoewel het moeilijk te voorspellen is wanneer OEM's precies 100% Ethernet-netwerken zullen implementeren, zijn de meeste OEM's bezig met het gebruik van Ethernet in huidige en toekomstige ontwerpen. Marvell's Bar-Niv suggereerde dat het adoptiepercentage de komende jaren zal toenemen.
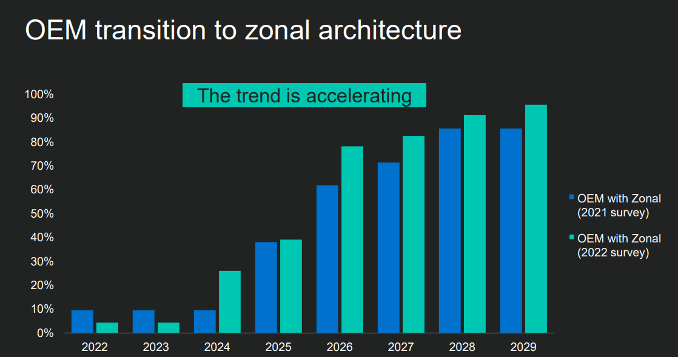
Figuur 4: De adoptie van zonale architectuur zal naar verwachting de komende jaren versnellen. Bron: Marvell
In feite is de adoptie al begonnen. BMW was een van de eersten die Ethernet in zijn voertuigen integreerde. In 2021 introduceerde het Gigabit Ethernet in zijn productiemodel BMW iX. Tegenwoordig wordt Ethernet in alle productiemodellen gebruikt.
Hyundai meldde, net als alle andere OEM's, dat het gebruik maakt van het hybride model van CAN en Ethernet. De Kona en Santa Fe zijn voorbeelden van modellen die Ethernet gebruiken om OTA te ondersteunen. Mercedes-Benz maakt gebruik van een combinatie van Ethernet en CAN/LIN. In 2013 gebruikten de 222 (S-Klasse) modellen CAN en LIN 2.1 voor de meeste bedieningselementen, terwijl Ethernet werd gebruikt voor de signaallichten. In 2020 gebruikte de lijn van 223 (S-Klasse) modellen van Mercedes-Benz Ethernet voor communicatie tussen belangrijke domeinen. Vanaf 2024 introduceert Audi een geheel nieuwe E/E-architectuur (E3), gebaseerd op het gedecentraliseerde Premium Platform Electric, dat de Ethernet-technologie zal uitbreiden met onder meer een snelle backbone.
Hoewel de meeste OEM's Ethernet in hun ontwerpen integreren, ondersteunen Toyota-modellen momenteel geen Ethernet.
Ondertussen bewegen Amerikaanse OEM's zich in de richting van zonale architecturen. "Een deel van de zonale aanpak is het verbinden van de krachtige rekencentra met alle functies die van een auto een auto maken, en dit door meer functies in één enkele zone te integreren", merkte Notarantonio van Infineon op. “De integratie kan helpen bij het verlagen van de materiaalkosten en de complexiteit van de kabelbomen.”
Bovendien gaan deze OEM's verder dan alleen het toevoegen van een functie of het toevoegen van een ECU, omdat dit een belangrijke bijdrage levert aan de complexiteit van kabelbomen en software, zei hij.
In Japan zijn de doelstellingen vergelijkbaar. Maar daar hebben OEM's domeingebaseerde architecturen geselecteerd om hun voertuigen te bouwen. “In beide gevallen zorgen ze voor de meeste updates in de centrale knooppunten en beperkte updates in zones of domeinen, maar softwaregedefinieerde voertuigen zijn het toekomstige pad om de complexiteit van software en kabelbomen te verminderen”, aldus Notarantonio.
Toekomst visie
Op basis van wat OEM's vandaag de dag doen, is het veilig om aan te nemen dat zonale architecturen aan kracht zullen blijven winnen. Naast het vereenvoudigen van het auto-ontwerp, creëert een zonale auto-architectuur nieuwe kansen voor de toeleveringsketen.
“Een mogelijke oplossing om de complexiteit van auto-netwerken te verminderen, zonale architectuur zorgt ervoor dat OEM’s de bedrading en communicatiepaden kunnen vereenvoudigen door de elektronische systemen van een voertuig in zones te organiseren, waarbij elke zone specifieke functies afhandelt om kostenbesparingen, verhoogde efficiëntie en verbeterde betrouwbaarheid te realiseren”, aldus Mei Ching (Maggie) Lim, ondersteuning voor bedrijfsoplossingen voor autonome voertuigen bij Keysight. “Een hoofddoel, het verminderen van het gewicht en de complexiteit van de kabelbomen, staat op gespannen voet met de vraag om de datadoorvoer te vergroten met behulp van communicatietechnologieën met hogere snelheden.”
Bovendien stelt het veeleisende gebruik van communicatiekanalen over langere afstanden, waarbij gebruik wordt gemaakt van inline-connectoren om meerdere netwerksegmenten met elkaar te verbinden, strenge eisen aan de elektrische prestaties. “Dit betekent dat opkomende standaarden het toegestane kanaalverlies rigoureus moeten definiëren, en dat testmethoden de prestaties moeten valideren”, aldus Lim. “Applicatievereisten bepalen de keuze voor de E/E-architectuur. Het samenvoegen van verschillende sensoren op één enkele link om het kabelgewicht en de kosten te verminderen, leidt tot hogere doorvoervereisten. Het verhogen van de efficiëntie en betrouwbaarheid, evenals het verminderen van het gewicht, zijn belangrijke drijfveren. Of de zonale architectuur echter de overhand krijgt, hangt af van een aantal factoren, waaronder technologische vooruitgang, adoptie door de industrie en de evoluerende behoeften van het auto-ecosysteem. Het niveau van autonomie, connectiviteitsvereisten en kostenoverwegingen zijn factoren. De industrie is dynamisch en de evolutie van de auto-architectuur zal afhangen van de voortdurende technologische ontwikkelingen en de succesvolle implementatie van deze concepten in toepassingen in de echte wereld.”
Bovendien beloven zonale architecturen schaalbaarheid, naast consolidatie van ECU-, netwerk- en UTP/STP-bedrading, waardoor de totale kosten worden verlaagd in vergelijking met een gedistribueerde/domeingebaseerde architectuur. "OTA-software-upgrades stellen OEM's in staat extra functies of diensten te leveren tijdens de levenscyclus van een voertuig, en zonale architecturen zullen het OTA-proces aanzienlijk verbeteren", voegde Schweiger van Cadence toe.
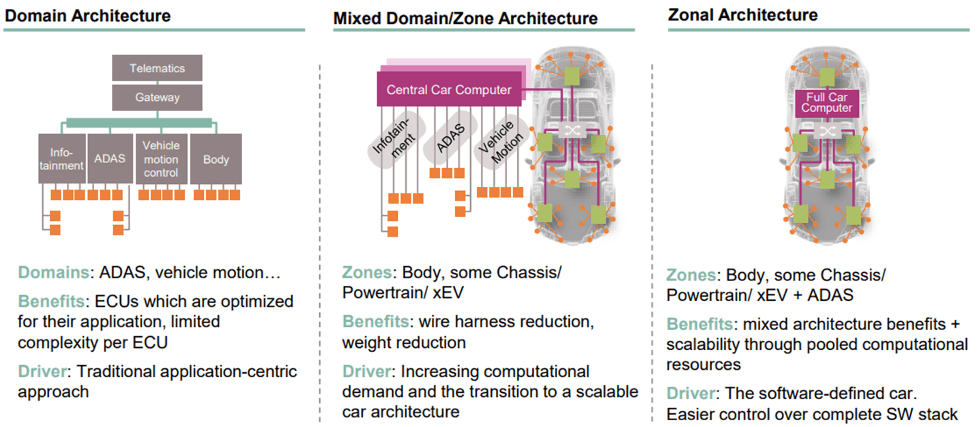
Figuur 5: In de nabije toekomst zullen domein- en zonale architecturen naast elkaar bestaan. Bron: Infineon
Hoewel zonale architecturen algemeen worden beschouwd als de toekomst, zal de transformatie tijd vergen. Sommige OEM's gaan op volle kracht vooruit, terwijl andere domeinarchitecturen blijven ondersteunen. Als gevolg hiervan zal er in de nabije toekomst waarschijnlijk een combinatie van netwerkprotocollen blijven bestaan die in de auto-industrie worden gebruikt.
Verder lezen
Voor SDV's is software de grootste uitdaging
De problemen zullen exponentieel toenemen naarmate softwaregedefinieerde voertuigen terrein winnen.
De complexiteit van de automobielsector en de kracht van de toeleveringsketen vereisen technische samenwerking
De relaties in het auto-ecosysteem strekken zich uit tot diepgaande technische ontwikkelingen terwijl de industrie zich richt op elektrificatie en autonomie.
- Door SEO aangedreven content en PR-distributie. Word vandaag nog versterkt.
- PlatoData.Network Verticale generatieve AI. Versterk jezelf. Toegang hier.
- PlatoAiStream. Web3-intelligentie. Kennis versterkt. Toegang hier.
- PlatoESG. carbon, CleanTech, Energie, Milieu, Zonne, Afvalbeheer. Toegang hier.
- Plato Gezondheid. Intelligentie op het gebied van biotech en klinische proeven. Toegang hier.
- Bron: https://semiengineering.com/auto-network-speeds-rise-as-carmakers-prep-for-autonomy/

