HELSINKI — 일본의 SLIM "Moon Sniper" 우주선이 금요일 달 착륙에 성공하여 로봇을 이용해 달에 착륙한 다섯 번째 나라가 되었습니다.
SLIM(Smart Lander for Investigating Moon) 우주선은 15월 10일 오전 00시(19UTC) 직후 1500km 근경에서 하강을 시작했으며, 초당 약 1,700m의 속도에서 감속했습니다.
SLIM은 일본 항공우주 탐사국(JAXA) 기간 동안 오전 10시 20분(1520 UTC)에 성공적으로 착륙한 것으로 보입니다. 실시간 스트리밍 이벤트의. 그러나 착륙이 성공했는지 여부는 즉시 명확하지 않았으며 라이브 스트리밍은 결론적으로 종료되지 않았습니다. 설명과 확인을 위해 한 시간 이상 기다렸습니다.
JAXA의 침묵 속에서 NASA는 딥 스페이스 네트워크 SLIM과 달 탐사 차량 1(LEV-1)(SLIM과 함께 이동하여 고도 1미터 표면으로 방출된 소형 탐사선)의 신호가 마드리드에서 수신되는 것으로 나타났습니다. 아마추어 추적국은 SLIM과 LEV-XNUMX 모두에서 신호를 보고했습니다.
JAXA는 착륙 후 2시간도 채 되지 않아 기자회견을 통해 착륙 성공을 확인했다. 그러나 우주선의 태양전지는 전기를 생산하지 못했습니다. 태양전지 문제의 원인은 즉각 알려지지 않았지만, 우주선 방향(착륙선이 굴러갔을 가능성)을 시사하는 가능성도 고려되고 있다. SLIM은 현재 배터리 전원을 사용하는 중입니다.
JAXA 관계자는 "우리는 연착륙 자체가 성공했다고 믿는다"며 우주선이 착륙에서 살아남아 데이터를 보내고 있다고 말했다.
팀은 데이터 수집과 과학 성과를 극대화하기 위해 노력하고 있습니다. LEV-1과 또 다른 로버인 LEV-2도 성공적으로 분리돼 작동 중인 것으로 확인됐다. JAXA는 다음 주에 또 다른 기자회견을 열 것이라고 밝혔습니다.
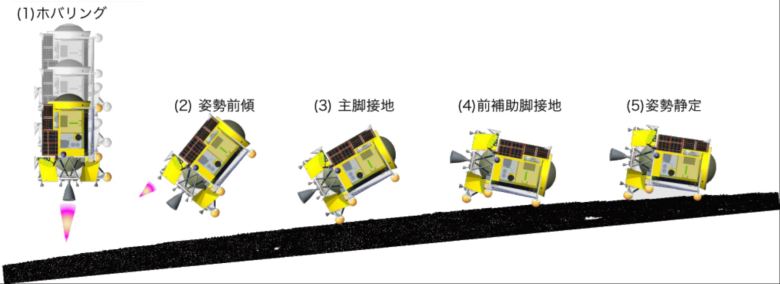
부서질 수 있는 3D 프린팅 알루미늄 격자 착륙 다리 XNUMX개는 착륙선이 달 표면에 닿을 때 충격을 흡수하는 데 도움이 되었습니다.
임무의 주요 목적은 우주선이 목표 지점에서 100m 이내에 착륙할 수 있도록 하는 정확한 착륙 기술을 입증하는 것이었습니다. SLIM은 폭 300m의 Shioli 분화구 내부 경사진 가장자리에 착륙하는 것을 목표로 하고 있었습니다.
착륙 성공 여부는 확인됐지만 '핀포인트' 착륙 성공 여부를 확인하는 데는 최대 한 달이 걸린다. 정확도는 달 궤도 관측을 통해 평가됩니다.
정확한 착륙은 단순한 공학적 업적이 아니라 더 큰 과학적 성과를 가져올 수 있는 업적입니다.
"정밀 착륙 시스템을 갖춘 SLIM 임무는 로봇 탐험가들의 달 착륙이 더욱 성공적인 한 해가 되길 바랍니다."라고 맨체스터 대학의 지구 과학 독자인 Katherine Joy는 말했습니다. SpaceNews.
"올바른 지점에 착지하는 것은 달의 진화에 대한 주요 과학적 질문을 테스트하고 가능한 달 자원을 평가하기 위해 탐색하려는 위치를 테스트하는 데 도움이 될 수 있는 정말 흥미로운 달 위치를 타겟팅하는 데 중요합니다."
이번 착륙은 인도가 달 착륙에 성공한 네 번째 국가가 된 지 불과 5개월도 채 되지 않아 이뤄졌다. 찬드라 얀 - 3. 또한 Astrobotic의 다음 날에 이어집니다. 페레그린 미션 XNUMX 달 착륙선이 지구 대기권에 재진입했고, 달 착륙 시도에 대한 이전 계획을 방해하는 추진제 누출이 발생했습니다.
일본이 달 착륙을 시도한 것은 이번이 처음이 아니다. 도쿄에 본사를 둔 민간 기업 ispace 달 착륙을 목표로 2023년 XNUMX월, 하지만 소프트웨어 문제 HAKUTO-R M1 달 착륙선의 손실로 이어졌습니다. 올해 후반에는 유사한 하드웨어와 업그레이드된 소프트웨어를 사용하는 새로운 시도가 계획되어 있습니다.
SLIM은 지구의 약 14일 동안의 음력 낮 시간의 나머지 시간을 달에서 과학 목표를 수행하는 데 보내게 됩니다. 우주선에는 방사성 동위원소 히터 장치가 탑재되어 있지 않으며 달의 밤 시간에는 생존할 수 없을 것으로 예상됩니다. 달의 밤에는 기온이 섭씨 영하 130도까지 떨어집니다.
우주선의 다중 대역 카메라(MBC)는 표면에서 반사되는 햇빛의 스펙트럼을 분석하여 Shioli 분화구의 구성을 평가합니다. 특히 달 표면 아래에서 방출되었을 수 있는 광물인 감람석의 존재를 검색하는 데 사용될 것입니다.
Joy는 “달의 중앙 고지대 근처에서 발견되는 Shioli 충돌 분화구는 매우 작은 충돌 분화구입니다.”라고 말합니다. “분화구 자체는 달에 있는 수백만 개의 작은 분화구와 크게 다르지 않습니다. 그러나 그것은 직경이 약 100km에 달하는 테오필루스(Theophilus)라고 불리는 충격 분화구의 분출 담요에 위치하므로 달 지각 내의 더 깊은 지평선에서 발굴된 암석과 광물을 샘플링할 수 있습니다."
SLIM은 또한 한 쌍의 작고 혁신적인 탐사선을 달까지 운반했습니다. LEV-1(달 탐사선 1)은 호핑 메커니즘을 사용하는 반면, LEV-2는 야구공 크기의 구형 탐사선입니다. 둘 다 카메라와 과학 탑재물을 가지고 있습니다.
날씬한 시작 6년 2023월 110일, 그리고 25월 XNUMX일 달까지 XNUMX일간의 순환 항해를 완료했습니다. 달 궤도 진입. 비행 프로필은 우주선 추진제를 절약하고 더 높은 과학 탑재량 질량을 허용했습니다.
우주선은 착륙 시도를 준비하기 위해 600월 14일 궤도를 원형의 XNUMXkm 극 궤도로 조정했습니다.
SLIM은 Peregrine Mission One과 함께 2024년 달 착륙 시도 중 하나입니다. 중국은 준비 중이다. 전례 없는 달 뒷면 샘플 반환 1월쯤 미션. 미국 기업 인튜이티브 머신스(Intuitive Machines)는 최대 XNUMX번의 착륙을 계획하고 있다. 첫 번째 IM-XNUMX은 현재 예정되어 있다. 2월 출시.
임무의 물결은 부분적으로 달, 특히 달 남극과 잠재적인 얼음 공급원을 둘러싼 새로운 관심에서 비롯됩니다. 이는 또한 증가하는 국제 및 상업 우주 역량과 발사 기회에 대한 접근과 일치합니다.
-
오후 12.51시 19분에 수정됨 동부, XNUMX월 XNUMX일, 착륙선의 태도와 잠재적으로 관련이 있는 태양전지 발전 문제를 명확히 했습니다.
- SEO 기반 콘텐츠 및 PR 배포. 오늘 증폭하십시오.
- PlatoData.Network 수직 생성 Ai. 자신에게 권한을 부여하십시오. 여기에서 액세스하십시오.
- PlatoAiStream. 웹3 인텔리전스. 지식 증폭. 여기에서 액세스하십시오.
- 플라톤ESG. 탄소, 클린테크, 에너지, 환경, 태양광, 폐기물 관리. 여기에서 액세스하십시오.
- PlatoHealth. 생명 공학 및 임상 시험 인텔리전스. 여기에서 액세스하십시오.
- 출처: https://spacenews.com/japan-makes-history-with-tense-successful-moon-landing/

