Araç içi ağlar, etki alanı mimarilerinden bölgesel mimarilere geçiş yapmaya başlıyor; bu yaklaşım, daha az protokol, daha az kablolama ve sonuçta daha düşük maliyet kullanarak bir araçtaki iletişimi basitleştirecek ve hızlandıracak.
Bölgesel mimariler, araçları daha yönetilebilir ve esnek bölgelere ayıracak ancak oraya ulaşmak zaman alacak. Günümüzde araçlarda o kadar çok eski teknoloji var ki, otomobil üreticilerinin alfabe çorbası protokolleri koleksiyonunu desteklemesi gerekiyor. Örneğin araçlar, dahili olarak geliştirilmiş bazı protokollerin yanı sıra bilgi-eğlence amaçlı Bluetooth, USB, LTE destekli mobil cihazları destekleyebilir. Kameralar için MIPI baskın protokoldür. ADAS'ın, ECU'ların ve sensör füzyonunun gerçek zamanlı kontrolü için de muhtemelen destek verecekler denetleyici alan ağları (CAN'lar), yerel ara bağlantı ağları (LIN'ler), Ethernet ve diğerleri.
Bu değişimi mümkün kılan temel unsurlardan biri daha hızlı iletişimdir. Birkaç yıl önce otomotiv ağlarının %93'ü 100 Mbps'nin altındaki hızlarda çalışıyordu ve bu durumun çoğunun bir gecede değişmesi muhtemel değil. Aslında 10/100/1000BASE-T1 olması muhtemeldir Otomotiv Etherneti CAN ve çeşitleri gibi düşük hızlı veri yolları, düşük hızlı iletişimlerin çoğuna hizmet vermeye devam edecek. Ancak arabalar çeşitli bölgelerden gelen girdilere dayanarak daha önemli kararlar almaya başladıkça, verilerin hızlı taşınması için zaman içinde araçlara çoklu gigabit hızlar eklenecek.
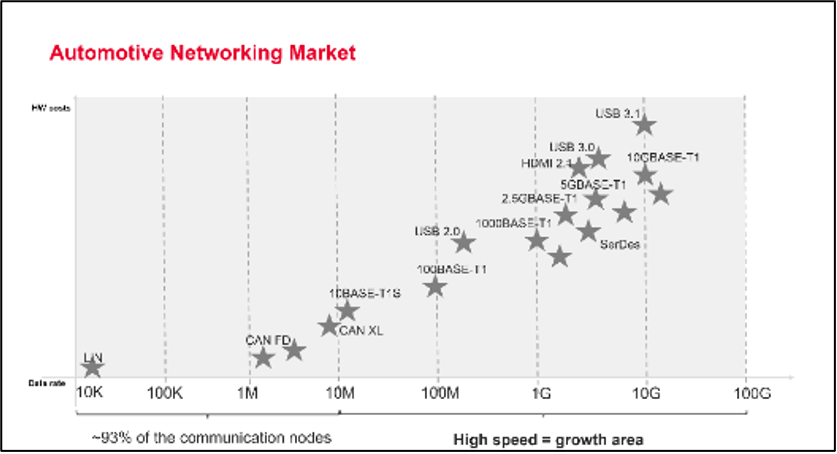
Şekil 1: Çeşitli otomotiv ağ teknolojilerinin karşılaştırılması. Kaynak: Keysight
Otomotiv Ethernet teknolojileri çözüm mimarı ve planlamacısı Jae Yong, "Otomobil endüstrisi, Otomotiv Ethernet'in tüm eski bağlantıların yerini almayacağını bekliyor" dedi. Keysight. "Bunun yerine farklı iletişim protokolleri ve yöntemlerinin bir karışımını görmeye devam edeceğiz. Şekil 1'in sağ üst köşesindeki dev yıldız kümesi en dinamik olanıdır ve birçok yeniliğin gerçekleştiği yerdir. Fizikten bildiğimiz gibi, yüksek baud hızları elektriksel paraziti, gürültü kaynaklarını, yansımaları, zayıflamaları ve sinyalleri ve bu sinyaller içinde taşınan verileri etkileyen diğer kayıpları artırır. Veri hızları ne kadar hızlı olursa dağıtımdan önce test etmek o kadar zorlu ve kritik olur. Çoklu gigabit Otomotiv Ethernet'in, IEEE 802.3ch ve IEEE 802.3cy standartlarına dayalı daha yüksek hızlı iletişim ihtiyaçlarını karşılamasını bekliyoruz. Örneğin, yakın zamanda IEEE 802.3cz grubundan piyasaya sürülen yeni bir multigigabit optik otomotiv Ethernet standardı var. Otomotiv ağı için ilginç bir dönem ve ileride birçok zorluk ve yenilik beklemeliyiz."
Diğerleri de daha hızlı iletişimin birdenbire bir değişimden ziyade evrimsel bir yön olduğunu öne sürerek aynı fikirde. Ancak bu değişimin avantajları yine de önemlidir.
David Fritz, Hibrit ve Sanal Sistemlerden Sorumlu Başkan Yardımcısı Siemens Digital Industries Yazılımı, Otomotiv Ethernet'in bu alanda olası lider olduğuna işaret ediyor. “Bant genişliği çok yakında L4 ve L5 özerkliğinin tüm uygulamalarını destekleyecek. Ayrıca CAN çerçeveleri Ethernet ağı üzerinden iletilebilir ve ağ geçitlerinin mevcut ECU'ları destekleyen yerel CAN ve CAN FD bölgesel ağlarını yönetmesine olanak tanır. Otomotiv Ethernetinin ağırlık ve güç yönleri geleneksel CAN ağlarından çok daha üstündür. Can FD, Ethernet'e rakip olarak ortaya çıkıyor ve jüri hala hangisinin galip geleceği konusunda kararsız. Ancak bir ipucu, yukarıda belirtilen özelliklerden dolayı sensör, aktüatör ve ECU sağlayıcılarının doğrudan Otomotiv Ethernetini desteklediğini görmemizdir."
Otomotiv Etherneti köklü bir seçimdir. Otomotiv çözümleri grup direktörü Robert Schweiger, "Buradaki hedeflerden biri, özel çözümlerin yerine mümkün olduğunca çok standartlaştırılmış ağ teknolojisi (protokoller, kontrolörler ve PHY'ler) kullanmaktır" dedi. Ritim. “Daha homojen bir ağ mimarisi oluşturmak için farklı ağ teknolojilerinin çeşitliliğini azaltmak diğer bir hedeftir. Bunu yapmak için Otomotiv Ethernet'ten (ör. 10BASE-T1, 100BASE-T1, 1000BASE-T1, 10G BASE-T1) yararlanılması gerekiyor."
Schweiger, bölgesel mimariler için temel olarak Otomotiv Ethernet, ASA Motion-Link/MIPI A-PHY, MIPI CSI2, MIPI DSI'ye dayanan bölgesel mimariyle araç içi ağın genel bant genişliği ve verimliliğinde önemli bir artış olacağını belirtti. POF, CAN ve LIN. "Elbette bu, OEM'den OEM'e değişiklik gösterebilir; bazı özel çözümler hâlâ karışımdadır."
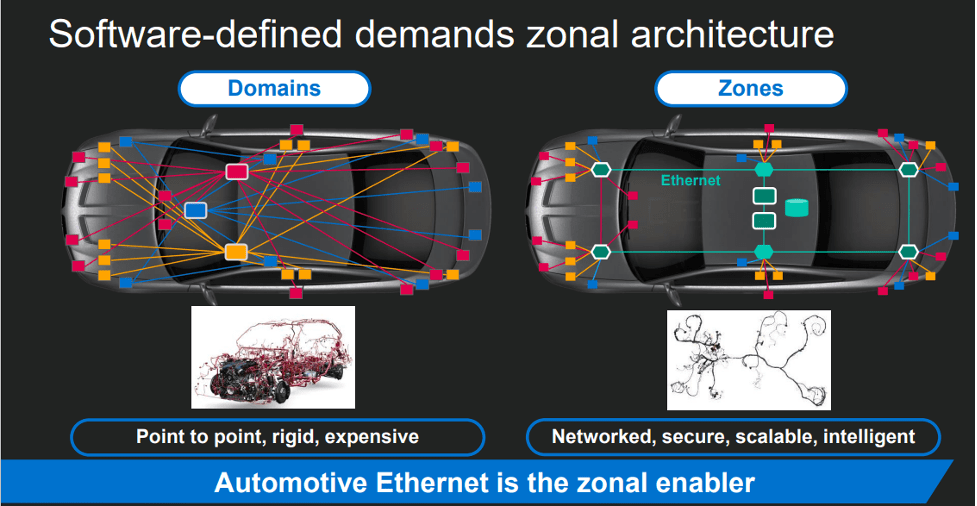
Şekil 2: Bölgesel mimari, geleneksel alan yaklaşımını basitleştirir. Kaynak: Marvell
Elbette otomotiv tasarımında hiçbir şey bir gecede değişmiyor. Tasarım döngüleri genellikle en az birkaç yıl sürer ve bazı bileşenlerin ve alt sistemlerin tasarımları piyasada bundan çok daha uzun süre kalabilir. Sonuç olarak, otomotiv ağı ortamı, protokollerin ve uygulamaya bağlı planların bir karışımı olmaya devam edecek. Bazıları bilgi-eğlence ve kabin içi yolcu davranışlarının izlenmesi gibi gerçek zamanlı olmayan uygulamalara hizmet edecek. Diğer protokoller güvenliği ve diğer gerçek zamanlı uygulamaları destekleyecektir.
Keysight Automotive SerDes Technologies çözüm mimarı ve planlamacısı Kevin Kershner, "Örneğin, sürücü araçtan ayrılırken çocuklar veya evcil hayvanlar gözetimsiz bırakılırsa sürücüler uyarılacak" dedi. "OEM'ler, özellikle otonom sürüşte performansı ve iletişim hızını artırırken gerçek zamanlı uygulamaların tasarımını basitleştirmek için çalışıyor."
Ayrıca otomotiv endüstrisindeki elektrik ve elektronik (E/E) mimarileri, sensör tabanlı sürücü destek sistemlerinin (ADAS) ve otonom sürüş (AD) uygulamalarının rolü de dahil olmak üzere giderek daha karmaşık hale gelen gereksinimleri destekleyecek şekilde gelişiyor.
Kershner, "Yüksek çözünürlüklü gösterge panelleri, yan dikiz aynası panelleri ve tüketici elektronik cihaz hizmetleriyle karşılaştırılabilecek bilgi-eğlence seçenekleri de dahil olmak üzere, aracın içinde ve çevresinde bol miktarda ekran teknolojisi var" dedi. "Kameralar, lidar ve radar da dahil olmak üzere birçok sensör, yüksek çözünürlüklü verileri yakalıyor, ardından bunu bir ADAS/AD uygulaması tarafından daha fazla işlenmek üzere diğer sensör verileriyle birlikte iletiyor veya bir araya getiriyor."
Çevre görüşlü kamera sistemlerine gelince, birden fazla kamera da aracın içindeki ekranlara video besleyebilir. "Burada, toplam sensör sayısı ve verileri aktarmak için gereken bant genişliği de dahil olmak üzere, E/E seçimini yönlendiren uygulama gereksinimleridir" dedi. "Bu, iletişim teknolojisi seçiminin gerçekten uygulamaya bağlı olduğu anlamına geliyor. Düşük hızlı işlevler, yüksek hızlı cihazların maliyeti, karmaşıklığı ve güç tüketimi nedeniyle 'aşırı tasarlanmış' yüksek hızlı otobüsleri kullanmamalıdır. Bazı teknolojiler noktadan noktayadır, diğerleri ise çoklu bağlantı düğümlerinin verimliliğini destekler. Bazı yüksek hızlı bağlantılar simetriktir ve yüksek güçlü bilgi işlem düğümleri arasında çift yönlü iletişimi destekler. Buna karşılık diğerleri, tek yönde yüksek verim gerektiren uygulamaları (örneğin, aşağı yöndeki kamera çıkışı, yukarı yöndeki komut ve kontrol) desteklemek üzere asimetrik olacak şekilde tasarlanmıştır.
Etki alanından bölgesel mimariye
ECU'lar araçlar için temel yapı taşlarıdır. Motorun çalışması, şanzıman, acil frenleme gibi çeşitli işlevlerin yanı sıra lastik basıncı ve kabin içi iklim kontrolü gibi diğer izleme işlevlerini kontrol ederler. Bölgesel mimariden farklı olarak, etki alanı mimarisi, çeşitli işlevleri, bu etki alanlarının fiziksel konumunu dikkate almadan etki alanları halinde gruplandırır. Etki alanı mimarilerinde, her etki alanını destekleyen ECU'lar araç içerisinde dağılabilir. Sonuç olarak, bu alanlara bağlanmak için uzun kablo tesisatlarına ihtiyaç duyulabilir.
Geleneksel olarak OEM'ler tasarımlarında etki alanı mimarisini kullanıyordu. Bir etki alanı mimarisinde kullanılan birincil ağ protokolleri, her ikisi de OEM'ler tarafından çeşitli işlevlerin gerçek zamanlı kontrolünü gerçekleştirmek için kullanılan denetleyici alan ağı (CAN) ve yerel ara bağlantı ağıdır (LIN). CAN (ISO 11898-1:2003) üç farklı hızı destekleyen bir seri ağ protokolüdür:
- Düşük hız — 125 metre veri yolu uzunluğunda 500 Kbps (maksimum)
- Yüksek hız — 1 metre veri yolu uzunluğunda 40 Mbps (maksimum)
- Esnek Veri Hızı (CAN FD) — 15 metre veri yolu uzunluğunda 10 Mbps (maksimum)
CAN, ECU'lar da dahil olmak üzere dağıtılmış gerçek zamanlı kontrol ve çoğullama cihazlarını desteklemek için güvenilir ve nispeten düşük maliyetli olduğunu kanıtladı. CAN'ı tamamlayan LIN (ISO 17987-2) aynı zamanda bir seri ağ protokolüdür. 19.2 Kbit/s'lik daha düşük bir veri hızını destekler ve genellikle karartma gibi kabin ışık kontrolünde kullanılır.
Sektör, yazılım tanımlı araçları ve otonom sürüşü desteklemek için daha fazla yazılım ve elektroniği birleştirmeye doğru ilerledikçe, daha yüksek hızlı iletişime olan talep artıyor. Görüşler farklılık gösterse de bazı uzmanlar, gelecekteki otonom sürüşün, çeşitli gerçek zamanlı ADAS ve ECU işlevlerini desteklemek için 50 Gbps aralığında veri aktarım hızlarına ihtiyaç duyacağını öne sürüyor. Ethernet Alliance'a göre, bugün Ethernet 100 Gbps kapasitesine sahiptir ve önümüzdeki birkaç yıl içinde saniyede terabit'e ulaşma potansiyeline sahiptir.
Yeni teknolojiler ve yeni özellikler geliştikçe bu durum değişebilir. Son yıllarda otomotiv ağları etki alanı tabanlı mimariden otomotiv Ethernet tabanlı bölgesel mimariye geçiş yapıyor.
Marvell'in otomotiv pazarlamasından sorumlu başkan yardımcısı Amir Bar-Niv, elektrikli bir araçtaki kablo demetlerinin toplam ağırlığının, bir araba motoru ve şasisinin ağırlığının hemen arkasında olduğunu söyledi. Kablo uzunluğunun ve sayısının azaltılması, aracın toplam ağırlığını azaltır, yakıt verimliliğini (veya elektrikli araçta menzili) artırır ve üretim sürecini basitleştirir.
İletişimi basitleştirmeye yönelik bir çaba da var. Şu anda bireysel ağların bir dizi bant genişliğini ve çeşitli farklı protokolleri desteklemesi gerekiyor. Örneğin ADAS, ağ protokollerinin bant genişliğini artırma ihtiyacını artıracaktır.
Kablosuz iletişim kısmen yardımcı olabilir çünkü bunların çoğu otomotiv dışında geliştirilmiş ve rafine edilmiştir. Otomotiv iş kolu otomotiv ortaklıkları direktörü Bernhard Rill, "Kablosuz protokoller genellikle otomotive özgü olmadığından, tüketici elektroniği cihazlarının desteğini sağlamak için daha da entegre edilecekler" dedi. Kol açıkladı. "Sektör genelinde, bu kablosuz protokollerin gelecekteki otomotive özgü kullanım durumları için nasıl kullanılabileceğini belirlemeye yönelik çalışmalar var. Günümüzde otomobiller çok sayıda ağ kullanıyor ve bu da iletişimi güçlendirme eğilimini teşvik ediyor. E/E mimarileri söz konusu olduğunda ağ oluşturmaya güçlü bir odaklanma vardır. Otomotiv OEM'leri CAN-FD ve 10BASE-T1S gibi Ethernet tabanlı ağlara yöneliyor. Ayrıca, birlikte çalışabilen 2.5 Gbps omurga Ethernet'in seri üretimde kullanım için güçlendirilmesi gerekiyor ve yüksek hızlı bağlantılarda tutarlı silikon tasarımlar için PCIe kullanılacak."
Bölgesel ve etki alanı mimarisi
Daha yüksek hızlı Ethernet kullanan bölgesel mimari fikri ivme kazanıyor çünkü üretimi, etki alanı mimarisiyle karşılaştırıldığında daha basit ve daha kolay. Bu teknoloji yaklaşımı, çeşitli işlevleri kontrol etmek için birden fazla bölgesel anahtar kullanır.
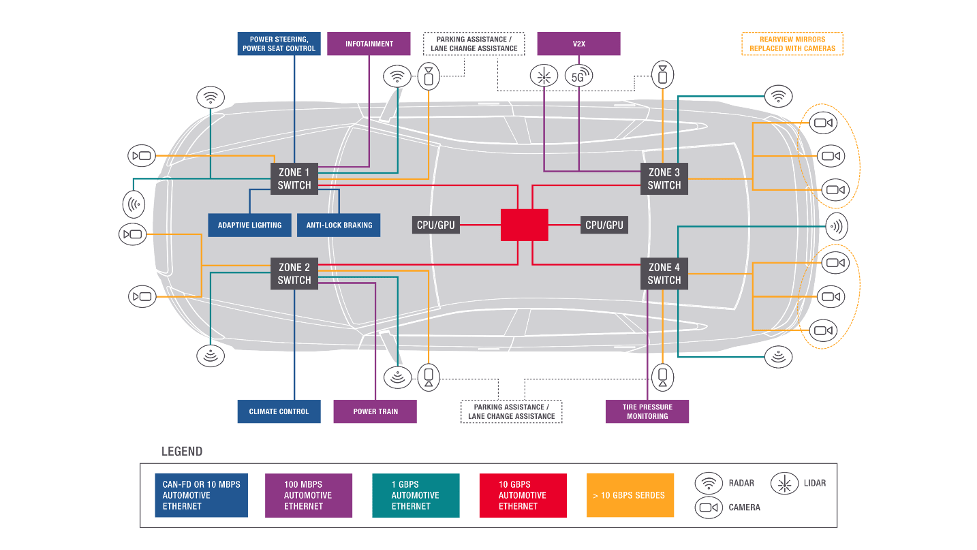
Şekil 3: Bölgesel mimari tasarımında, bir araçtaki çeşitli fonksiyonları kontrol etmek için farklı hızlara sahip birden fazla bölgesel anahtar kullanılır. Kaynak: Keysight
İşletim sistemi ile donanım arasında yer alan ara yazılım yığınları, bölgesel mimaride giderek daha önemli hale gelecek ve birçok otonom sürüş fonksiyonu gibi ADAS ve acil frenleme ara yazılım tarafından gerçekleştirilir. Hizmet kalitesi, müzik akışı yerine görev açısından kritik, gerçek zamanlı ve zamana duyarlı trafiğin önceliklendirilmesi de dahil olmak üzere ara yazılımda kilit öneme sahiptir.
Arm's Rill, otomotiv E/E mimarilerinin bölgesel ilerlemeye doğru değişeceğine dair açık göstergeler görüyor. Kol'a dikkat çekti aktif olarak çalışıyor ADAS ve gövde uygulamalarına ek olarak kabinle ilgili dijital kullanım senaryoları da dahil olmak üzere bölgesel kontrolörlerin nasıl kullanılabileceğini ve burada hangi işlevlerin barındırılabileceğini belirlemek için ekosistem ortaklarıyla birlikte çalışıyoruz. "Otomotivdeki uzun gelişim döngüleri göz önüne alındığında, bölgesel mimariye geçiş zaman alacak."
Miras faktörü
Bununla birlikte, OEM'ler tarafından hâlihazırda kullanılan birçok eski ağ protokolü göz önüne alındığında, Ethernet kullanarak bölgesel mimariye geçiş, göründüğünden daha zor olabilir. Herhangi bir yeni tasarımın, eski protokolleri değiştirdikten sonra en azından eskileri kadar iyi çalışması gerekecektir. Asıl zorluk, yeni ürün tanıtımlarını etkilemeden yumuşak bir geçiş uygulamaktır. Sonuç olarak, OEM'ler farklı derecelerde bölgesel dönüşüme ve zaman çizelgelerine sahip olabilir.
Kıdemli Direktör Ray Notarantonio şunları söyledi: "Çoğu uygulamada, aracın gerçek zamanlı çalışması gibi operasyonel yönlerini destekleyen bir gecikme ve/veya yük gereksinimi vardır; örneğin yüksek gecikme/düşük yük için LIN, düşük gecikme/yüksek yük için Ethernet." Amerika kıtası için araç kullanıcı deneyimi segmenti Infineon Technologies. Genel olarak ağlar bu ihtiyaçlara göre boyutlandırılır ve bu, uygulama başına en iyi maliyet-performans oranını destekler. Ağların tasarım gereği gereğinden fazla veya az kullanılmamasını sağlar.
Öte yandan yazılım tanımlı araç yaklaşımına geçmeyi planlayan OEM'ler bölgesel mimariyi tercih edecek. Meindert van den Beld, "Bu yoğun bölgelendirme, aynı fiziksel kaynakları paylaşan sistemlerin tam izolasyonunu sağlayabilen, daha fazla emniyet/güvenlik odaklı bölgesel modülleri birbirine bağlayan çok Gb'li, yüksek düzeyde mühendislik gerektiren bir Ethernet omurgasının tanıtılmasını içerecektir" dedi. NXP'de Araç İçi Ağ İletişimi'nden sorumlu kıdemli başkan yardımcısı ve genel müdür.
Bu nedenle, yeni kurulan şirketler veya yeni OEM'ler, bölgesel bir mimariyi benimseme konusunda eski tasarımlara sahip OEM'lere göre daha fazla esnekliğe sahip olabilir.
Ürün Pazarlama Direktörü Sam Gold şunları söyledi: "Bölgesel mimarinin uygulamaya konması büyük ölçüde bireysel OEM stratejilerine bağlıdır." Renesas' Yüksek Performanslı Bilgi İşlem, Analog ve Güç Çözümleri Grubu. “Yeni oyuncular mevcut mimarileri değiştirmekte daha özgür, hatta yeni mimari konseptlerini uygulamaya sıfırdan başlayabiliyorlar. Öte yandan, yerleşik OEM'ler güçlü eski bağımlılıklarla karşı karşıya kalabilir ve güçlü bir karşılıklı bağımlılığa sahip çok çeşitli otomobil modellerine sahip olabilirler. Bu, ağ topolojisi veya mimarisinde yalnızca marjinal veya evrimsel değişikliklerin uygulanabileceği gerçeğine yol açmaktadır. Emniyet kemerinin maliyetini, karmaşıklığını ve ağırlığını azaltmaya yönelik genel hedef tüm OEM'ler tarafından paylaşılmaktadır. Burada ayrıca emniyet kemerinin manuel üretimine karşı otomatik üretimi büyük bir maliyet faktörüdür."
Bölgesel güvenlik endişeleri
Güvenlik, otomotivde büyük bir endişe kaynağı olmaya devam ediyor ve bölgesel bir mimarinin denetimi teorik olarak daha kolay olsa da CAN, LIN, Ethernet ve diğer teknolojilerin bir kombinasyonunun olabileceği dönüşüm aşaması yeni güvenlik açıkları yaratabilir. Bu, OEM'lerin siber saldırı riskini azaltmak için daha fazla çalışması anlamına geliyor.
Keysight otonom araçlar iş kolu ürün müdürü Carrie Browen, "Otomotiv endüstrisi giderek daha karmaşık hale gelen ekranlara ve bağlantı taleplerine uyum sağlamaya başladıkça karmaşıklık yeni normal haline geldi" dedi. "Araç içindeki ağlar daha hızlı ve daha karmaşık hale geldikçe, tutarlı işlevsellik sağlamak için daha yüksek düzeyde test talep ediliyor. Bu sadece bir lüks değil, aynı zamanda her arayüzün siber tehditlere karşı korunmasını sağlamak bir zorunluluktur. Araçta CAN, Bluetooth, Otomotiv Etherneti, SerDes, kablosuz, hücresel gibi daha fazla bağlantı olması durumunda, bilgilerin bozulması ve potansiyel bir tehdit arayüzü olarak görülme olasılığı daha yüksektir. Bu nedenle tasarım, doğrulama ve üretim sırasında düzenlemelere (ISO/SAE 21434 ve UN-R155) uyum ve ağların doğrulanması gereklidir."
Infineon'un Notarantonio'su kabul etti. “Ağ güvenliği birkaç yıldır araçlarda standart hale geldi. Mesajların kimlik doğrulaması, güvenli bir etki alanındaki donanım güvenlik modülleri ve özel yazılımlarla yapılır. CAN ve CAN-FD ağları güvenliği ekleyen ilk ağlar arasındaydı ve bu, o zamandan bu yana daha da genişledi. Bugün, araçlardaki Ethernet gibi yeni ağları korumak için seçimler yapılıyor; bazıları MACSEC'i, diğer IPSEC'i seçiyor, ancak hiçbir şey güvensiz kalmıyor.”
Aynı zamanda, araca giderek daha fazla bağlantı sağlanabildiğinden, otomotiv ağlarının zorunlu siber güvenlik risk yönetimi ile tasarlanması gerekiyor.
Renesas' Gold, "OEM'ler derinlemesine bir savunma geliştirmeli, aynı zamanda kripto çevikliğini de sağlamalıdır" dedi. “Derinlemesine savunma, harici araç iletişiminin (örneğin, TLS, harici I/F kimlik doğrulaması) ve dahili iletişimin (örneğin, IDS/IPS, TLS, MACsec, IPsec, SecOC) korunmasını dikkate almalıdır. Güvenlik günlükleri Yukarıdaki koruma mekanizmalarının tümü, araç otomotiv ağlarına yönelik siber tehditleri azaltmak için gerekirse kablosuz aygıt yazılımı aracılığıyla güvenlik yamaları dağıtabilen bir araç güvenlik operasyon merkezi tarafından analiz edilebilir. Daha uzun anahtar uzunluğu ve/veya kriptosistemlerin bozulması nedeniyle otomotiv ağ protokolü güncellemelerini desteklemek için şifreleme çevikliği dikkate alınmalıdır. Kuantum sonrası kripto, yeni nesil bir algoritma olarak değerlendiriliyor. Güvenlik darboğazlarını (örn. dağıtılmış güvenlik işlemleri) önlemek için uygun mimariler tanımlanmalıdır.”
OEM'in benimsenmesi
OEM'lerin tam olarak ne zaman %100 Ethernet ağlarını uygulayacağını tahmin etmek zor olsa da çoğu OEM, mevcut ve gelecekteki tasarımlarında Ethernet kullanmaya doğru ilerliyor. Marvell'den Bar-Niv, benimseme oranının önümüzdeki birkaç yıl içinde hızlanacağını öne sürdü.
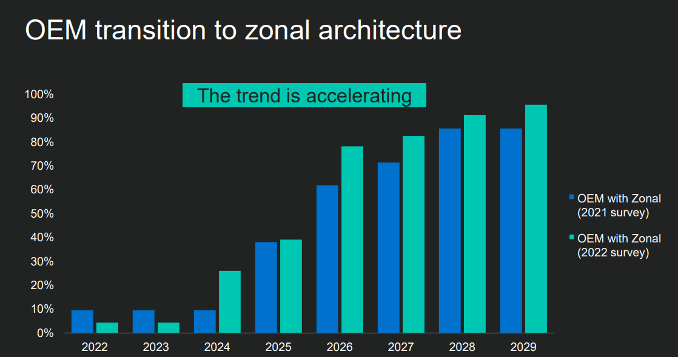
Şekil 4: Bölgesel mimarinin benimsenmesinin önümüzdeki birkaç yıl içinde hızlanması bekleniyor. Kaynak: Marvell
Aslında evlat edinme süreci çoktan başladı. BMW, Ethernet'i araçlarına dahil eden ilk şirketlerden biriydi. 2021 yılında BMW iX üretim modelinde Gigabit Ethernet'i tanıttı. Günümüzde tüm üretim modellerinde Ethernet kullanılmaktadır.
Hyundai, diğer tüm OEM'ler gibi CAN ve Ethernet'in hibrit modelini kullandığını bildirdi. Kona ve Santa Fe, OTA'yı desteklemek için Ethernet kullanan modellere örnektir. Mercedes-Benz Ethernet ve CAN/LIN kombinasyonunu kullanıyor. 2013 yılında, 222 (S-Sınıfı) modelleri çoğu kontrol için CAN ve LIN 2.1 kullanırken, sinyal ışıkları için Ethernet kullanıyordu. 2020 yılına gelindiğinde, Mercedes-Benz'in 223 (S-Serisi) model serisi, büyük alanlar arasındaki iletişim için Ethernet kullanıyordu. Audi, 2024'ten başlayarak, yüksek hızlı bir omurga da dahil olmak üzere Ethernet teknolojisini genişletecek, merkezi olmayan Premium Platform Electric'i temel alan tamamen yeni bir E/E mimarisini (E3) tanıtacak.
Çoğu OEM, Ethernet'i tasarımlarına dahil ederken, Toyota modelleri şu anda Ethernet'i desteklememektedir.
Bu arada ABD OEM'leri bölgesel mimarilere doğru ilerliyor. Infineon'dan Notarantonio şunu gözlemledi: "Bölgesel yaklaşımın bir parçası, yüksek performanslı bilgi işlem merkezlerini bir arabayı araba yapan tüm işlevlere bağlamak ve bunu daha fazla işlevi tek bir bölgeye entegre ederek yapmaktır." "Entegrasyon, malzeme maliyetinin ve kablo demeti karmaşıklığının azaltılmasına yardımcı olabilir."
Dahası, bu OEM'ler sadece bir işlev eklemenin veya bir ECU eklemenin ötesine geçiyor çünkü bu, kablo tesisatı ve yazılım karmaşıklığına önemli bir katkı sağlıyor, dedi.
Japonya'da da hedefler benzer. Ancak orada OEM'ler araçlarını oluşturmak için etki alanı tabanlı mimarileri seçtiler. Notarantonio, "Her iki durumda da, merkezi düğümlerde çoğu güncellemeye ve bölgelerde veya alanlarda sınırlı güncellemelere izin veriyorlar, ancak yazılım tanımlı araçlar, yazılım ve kablo demeti karmaşıklığını azaltmanın gelecekteki yoludur" dedi.
Gelecek vizyonu
OEM'lerin bugün yaptıklarına bakıldığında bölgesel mimarilerin ivme kazanmaya devam edeceğini varsaymak yanlış olmaz. Bölgesel otomotiv mimarisi, otomotiv tasarımını basitleştirmenin yanı sıra tedarik zinciri için yeni fırsatlar yaratıyor.
Mei Ching, "Otomotiv ağ karmaşıklığını azaltmaya yönelik potansiyel bir çözüm olan bölgesel mimari, OEM'lerin bir aracın elektronik sistemlerini her bir bölgenin maliyet tasarrufu, artan verimlilik ve gelişmiş güvenilirlik elde etmek için belirli işlevleri ele aldığı bölgelere göre düzenleyerek kablolama ve iletişim yollarını basitleştirmesine olanak tanıyor" dedi. (Maggie) Lim, Keysight'ta otonom araç iş kolu çözüm desteği. "Kablo donanımının ağırlığını ve karmaşıklığını azaltmak olan temel hedef, yüksek hızlı iletişim teknolojilerini kullanarak veri verimini artırma talebiyle çelişiyor."
Ayrıca, birden fazla ağ bölümünü birleştirmek için hat içi konektörlerin kullanıldığı, daha uzun mesafelerde zorlu iletişim kanalı operasyonu, elektrik performansına sıkı gereksinimler getirmektedir. Lim, "Bu, ortaya çıkan standartların izin verilen kanal kaybını titizlikle tanımlaması gerektiği ve test yöntemlerinin performansı doğrulaması gerektiği anlamına geliyor" dedi. “Uygulama gereksinimleri E/E mimarisi seçimini belirliyor. Kablo ağırlığını ve maliyetini azaltmak için çeşitli sensörleri tek bir bağlantıda toplamak, daha yüksek verim gereksinimlerine yol açar. Verimliliğin ve güvenilirliğin artırılmasının yanı sıra ağırlığın azaltılması da önemli etkenlerdir. Ancak bölgesel mimarinin baskın hale gelip gelmeyeceği, teknolojik gelişmeler, endüstrinin benimsenmesi ve otomotiv ekosisteminin gelişen ihtiyaçları dahil olmak üzere bir dizi faktöre bağlıdır. Özerklik düzeyi, bağlantı gereksinimleri ve maliyet hususları faktörlerdir. Sektör dinamiktir ve otomotiv mimarisinin evrimi, devam eden teknolojik gelişmelere ve bu kavramların gerçek dünya uygulamalarında başarılı bir şekilde uygulanmasına bağlı olacaktır."
Ek olarak bölgesel mimariler, ECU, ağ ve UTP/STP kablolama birleştirmenin yanı sıra ölçeklenebilirlik vaat ederek, dağıtılmış/etki alanı tabanlı bir mimariyle karşılaştırıldığında genel maliyetlerin azaltılmasına yardımcı olur. Cadence'den Schweiger, "OTA yazılım yükseltmeleri, OEM'lerin bir aracın yaşam döngüsü boyunca ek özellikler veya hizmetler sunmasına olanak tanıyor ve bölgesel mimariler OTA sürecini önemli ölçüde iyileştirecek" diye ekledi.
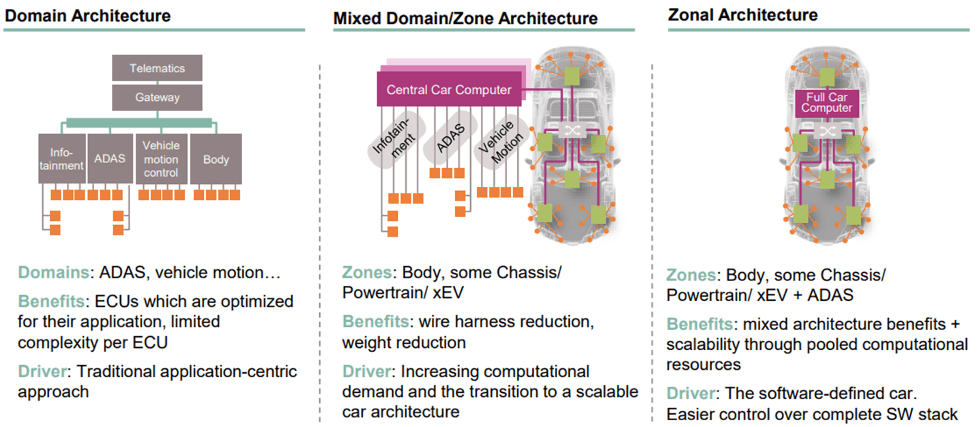
Şekil 5: Yakın gelecekte etki alanı ve bölgesel mimariler bir arada var olacak. Kaynak: Infineon
Bölgesel mimariler yaygın olarak gelecek olarak kabul edilirken, dönüşüm zaman alacak. Bazı OEM'ler tam hızda şarj olurken diğerleri etki alanı mimarilerini desteklemeye devam ediyor. Sonuç olarak, öngörülebilir gelecekte otomotiv tasarımında kullanılan ağ protokollerinin bir karışımı muhtemelen devam edecektir.
Daha fazla Okuma
SDV'ler İçin Yazılım En Büyük Zorluktur
Yazılım tanımlı araçlar ilgi kazandıkça sorunlar katlanarak artacaktır.
Otomotiv Karmaşıklığı, Tedarik Zincirinin Gücü Teknik İşbirliği Gerektiriyor
Endüstri elektrifikasyona ve özerkliğe yönelirken, otomotiv ekosistemindeki ilişkiler derin teknik gelişmelere kadar uzanıyor.
- SEO Destekli İçerik ve Halkla İlişkiler Dağıtımı. Bugün Gücünüzü Artırın.
- PlatoData.Network Dikey Üretken Yapay Zeka. Kendine güç ver. Buradan Erişin.
- PlatoAiStream. Web3 Zekası. Bilgi Genişletildi. Buradan Erişin.
- PlatoESG. karbon, temiz teknoloji, Enerji, Çevre, Güneş, Atık Yönetimi. Buradan Erişin.
- PlatoSağlık. Biyoteknoloji ve Klinik Araştırmalar Zekası. Buradan Erişin.
- Kaynak: https://semiengineering.com/auto-network-speeds-rise-as-carmakers-prep-for-autonomy/

