Home > Press > Robot caterpillar demonstrates new approach to locomotion for soft robotics
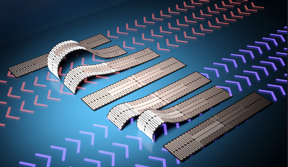 |
| Researchers at North Carolina State University have demonstrated a caterpillar-like soft robot that can move forward, backward and dip under narrow spaces. The caterpillar-bot’s movement is driven by a novel pattern of silver nanowires that use heat to control the way the robot bends, allowing users to steer the robot in either direction. CREDIT Shuang Wu, NC State University |
Abstract:
Researchers at North Carolina State University have demonstrated a caterpillar-like soft robot that can move forward, backward and dip under narrow spaces. The caterpillar-bot’s movement is driven by a novel pattern of silver nanowires that use heat to control the way the robot bends, allowing users to steer the robot in either direction.
Robot caterpillar demonstrates new approach to locomotion for soft robotics
Durham, NC | Posted on March 24th, 2023
“A caterpillar’s movement is controlled by local curvature of its body – its body curves differently when it pulls itself forward than it does when it pushes itself backward,” says Yong Zhu, corresponding author of a paper on the work and the Andrew A. Adams Distinguished Professor of Mechanical and Aerospace Engineering at NC State. “We’ve drawn inspiration from the caterpillar’s biomechanics to mimic that local curvature, and use nanowire heaters to control similar curvature and movement in the caterpillar-bot.
“Engineering soft robots that can move in two different directions is a significant challenge in soft robotics,” Zhu says. “The embedded nanowire heaters allow us to control the movement of the robot in two ways. We can control which sections of the robot bend by controlling the pattern of heating in the soft robot. And we can control the extent to which those sections bend by controlling the amount of heat being applied.”
The caterpillar-bot consists of two layers of polymer, which respond differently when exposed to heat. The bottom layer shrinks, or contracts, when exposed to heat. The top layer expands when exposed to heat. A pattern of silver nanowires is embedded in the expanding layer of polymer. The pattern includes multiple lead points where researchers can apply an electric current. The researchers can control which sections of the nanowire pattern heat up by applying an electric current to different lead points, and can control the amount of heat by applying more or less current.
“We demonstrated that the caterpillar-bot is capable of pulling itself forward and pushing itself backward,” says Shuang Wu, first author of the paper and a postdoctoral researcher at NC State. “In general, the more current we applied, the faster it would move in either direction. However, we found that there was an optimal cycle, which gave the polymer time to cool – effectively allowing the ‘muscle’ to relax before contracting again. If we tried to cycle the caterpillar-bot too quickly, the body did not have time to ‘relax’ before contracting again, which impaired its movement.”
The researchers also demonstrated that the caterpillar-bot’s movement could be controlled to the point where users were able steer it under a very low gap – similar to guiding the robot to slip under a door. In essence, the researchers could control both forward and backward motion as well as how high the robot bent upwards at any point in that process.
“This approach to driving motion in a soft robot is highly energy efficient, and we’re interested in exploring ways that we could make this process even more efficient,” Zhu says. “Additional next steps include integrating this approach to soft robot locomotion with sensors or other technologies for use in various applications – such as search-and-rescue devices.”
The paper, “Caterpillar-Inspired Soft Crawling Robot with Distributed Programmable Thermal Actuation,” will be published March 22 in the journal Science Advances. The paper was co-authored by Jie Yin, an associate professor of mechanical and aerospace engineering at NC State; Yaoye Hong, a Ph.D. student at NC State; and by Yao Zhao, a postdoctoral researcher at NC State.
The work was done with support from the National Science Foundation, under grants 2122841, 2005374 and 2126072; and from the National Institutes of Health, under grant number 1R01HD108473.
####
For more information, please click here
Contacts:
Media Contact
Matt Shipman
North Carolina State University
Expert Contact
Yong Zhu
NC State University
Copyright © North Carolina State University
If you have a comment, please Contact us.
Issuers of news releases, not 7th Wave, Inc. or Nanotechnology Now, are solely responsible for the accuracy of the content.
Bookmark:








| Related Links |
| Related News Press |
News and information
![]() Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
![]() Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
![]() Light meets deep learning: computing fast enough for next-gen AI March 24th, 2023
Light meets deep learning: computing fast enough for next-gen AI March 24th, 2023
![]() Bilayer PET/PVDF substrate-reinforced solid polymer electrolyte improves solid-state lithium metal battery performance March 24th, 2023
Bilayer PET/PVDF substrate-reinforced solid polymer electrolyte improves solid-state lithium metal battery performance March 24th, 2023
Robotics
![]() Nanostructured fibers can impersonate human muscles June 3rd, 2022
Nanostructured fibers can impersonate human muscles June 3rd, 2022
![]() Shape memory in hierarchical networks – the astonishing property that allows manipulation of morphing materials with micro scale resolutions February 25th, 2022
Shape memory in hierarchical networks – the astonishing property that allows manipulation of morphing materials with micro scale resolutions February 25th, 2022
Govt.-Legislation/Regulation/Funding/Policy
![]() New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
![]() Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
![]() Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
Possible Futures
![]() New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
![]() Graphene grows – and we can see it March 24th, 2023
Graphene grows – and we can see it March 24th, 2023
![]() HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
![]() A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
Discoveries
![]() New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
New experiment translates quantum information between technologies in an important step for the quantum internet March 24th, 2023
![]() Graphene grows – and we can see it March 24th, 2023
Graphene grows – and we can see it March 24th, 2023
![]() HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
![]() A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
Announcements
![]() Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
![]() Light meets deep learning: computing fast enough for next-gen AI March 24th, 2023
Light meets deep learning: computing fast enough for next-gen AI March 24th, 2023
![]() Bilayer PET/PVDF substrate-reinforced solid polymer electrolyte improves solid-state lithium metal battery performance March 24th, 2023
Bilayer PET/PVDF substrate-reinforced solid polymer electrolyte improves solid-state lithium metal battery performance March 24th, 2023
![]() Understanding the mechanism of non-uniform formation of diamond film on tools: Paving the way to a dry process with less environmental impact March 24th, 2023
Understanding the mechanism of non-uniform formation of diamond film on tools: Paving the way to a dry process with less environmental impact March 24th, 2023
Interviews/Book Reviews/Essays/Reports/Podcasts/Journals/White papers/Posters
![]() HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
HKUMed invents a novel two-dimensional (2D) ultrasound-responsive antibacterial nano-sheets to effectively address bone tissue infection March 24th, 2023
![]() A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
A universal HCl-assistant powder-to-powder strategy for preparing lead-free perovskites March 24th, 2023
![]() Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
Optical switching at record speeds opens door for ultrafast, light-based electronics and computers: March 24th, 2023
![]() Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
Semiconductor lattice marries electrons and magnetic moments March 24th, 2023
- SEO Powered Content & PR Distribution. Get Amplified Today.
- Platoblockchain. Web3 Metaverse Intelligence. Knowledge Amplified. Access Here.
- Source: http://www.nanotech-now.com/news.cgi?story_id=57319

