Et team av forskere i Kina har utviklet nye "mikrofiberbots" med magnetisk coil og brukt dem til å embolisere arteriell blødning hos en kanin – og banet vei for en rekke kontrollerbare og mindre invasive behandlinger for aneurismer og hjernesvulster.
Når de forsøker å stoppe blødninger i aneurismer eller stoppe blodstrømmen til hjernesvulster (en prosess kjent som embolisering), kjører kirurger vanligvis et slankt kateter gjennom lårbensarterien og navigerer det gjennom blodårene for å levere emboliske midler. Selv om de er mye brukt, er disse katetrene vanskelige å lede gjennom komplekse vaskulære nettverk.
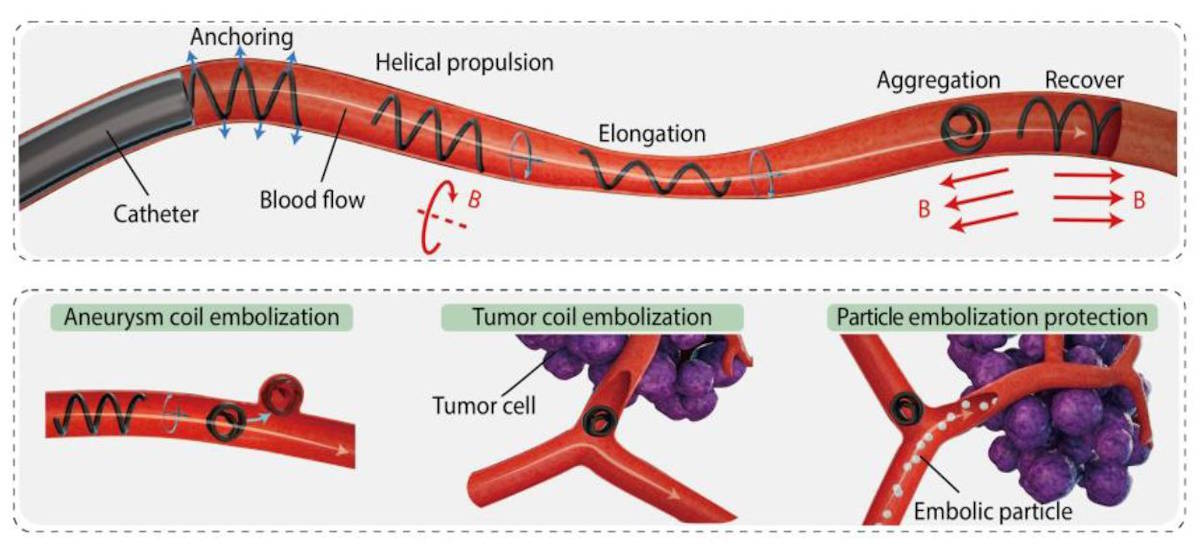
I et forsøk på å møte denne utfordringen, har et team av forskere ved Huazhong University of Science and Technology (HUST) laget små magnetiske, myke mikrofiberboter som kan utføre slike prosedyrer eksternt. Enhetene, laget av en magnetisert fiber vridd til en spiralform, kan passe til en rekke forskjellige fartøystørrelser og bevege seg på en korketrekker måte når de utsettes for et eksternt magnetfelt. Resultatene av forskningen, presentert i Science Robotics, demonstrere hvordan enhetene ble brukt til å stoppe arteriell blødning hos en kanin.
Som medforfatter Jianfeng Zhang forklarer at mikrofiberbotene er laget ved å bruke termisk energi til å trekke magnetiske myke komposittmaterialer inn i mikrofibre, som deretter "magnetiseres og støpes for å gi dem spiralformet magnetisk polaritet". Ved å kontrollere magnetfeltet, demonstrerte den magnetiske myke mikrofiberroboten reversibel morfologisk transformasjon (forlengelse eller aggregering) og spiralfremdrift gjennom blodstrøm (både oppstrøms og nedstrøms). Dette gjør at den kan navigeres gjennom komplekse vaskulære systemer og utføre robotembolisering i sub-millimeterområdet.
«Artikkelen viser hvordan vi presterte vitro embolisering av aneurismer og svulster i en nevrovaskulær modell, og utført robotnavigasjon og embolisering under sanntidsfluoroskopi i en in vivo kanin femoral arterie modell, sier Zang. "Disse eksperimentene viser den potensielle kliniske verdien av dette arbeidet og baner vei for fremtidige robotassisterte emboliseringskirurgiske alternativer."
Forankringsfunksjon
I følge førsteforfatter Xurui Liu, en doktorgradsstudent ved HUST, har hver mikrofiberbot en forankringsfunksjon, lik den til en vaskulær stent, som gjør at den kan forankres stabilt til den indre veggen av blodårene gjennom kontaktfriksjon for å unngå å bli vasket bort av blodstrømmen.
"Den spiralformede magnetiseringsfordelingen gir mikrofiberroboten en netto magnetiseringsretning langs sin sentrale akse. Ved å påføre et eksternt magnetfelt i samsvar med retningen til nettmagnetiseringsretningen, kan roboten forlenges, sier hun.
"Omvendt, når det eksterne magnetfeltet er motsatt av retningen for nettmagnetisering, vil roboten samle seg," legger hun til. "Mykheten og den høye robustheten til denne mikrofiberroboten sikrer at dens morfologiske rekonstruksjonsfunksjon forblir fullt reversibel etter mer enn tusen aggregerings- og forlengelsessykluser."
Lovende alternativ
I motsetning til de magnetiske myke robotene som er rapportert i tidligere forskning, bekrefter Zang at de spiralformede magnetiseringsretningsegenskapene til de nye robotene gjør at deformasjons- og bevegelsesmodusene deres kan kobles ortogonalt uavhengig av kontrollmagnetfeltet, noe som gir "unik magnetfeltkontrollfleksibilitet".
"Denne funksjonen lar ikke bare en enkelt mikrofiberrobot bevege seg med høy hastighet mot blodstrømmen under påvirkning av et roterende magnetfelt, men muliggjør også uavhengig kontroll av formen og bevegelsen til flere mikrofiberboter," forklarer Zang.
"I tillegg er disse enhetene kompatible med vanlige intervensjonskatetre for å maksimere potensialet for bruk i kliniske omgivelser," legger han til.
Står overfor utfordringene med tradisjonelle metoder som kateterbasert embolisering – spesielt når det gjelder deres operasjonelle begrensninger og utilstrekkelig presisjon, samt helserisikoen knyttet til at leger blir utsatt for stråling i lange perioder (fra røntgenveiledningen) system) – Zang påpeker at utviklingen av magnetisk mikrofiberbotteknologi gir klinikere et nytt middel til å forbedre eksisterende behandlinger.

Magnetiske mikroroboter står i kø for stamcelleterapi
"Utviklingen av mikrofiberboter gir et nytt perspektiv for vaskulær emboliseringsbehandling og viser brukspotensiale innen minimalt invasiv kirurgisk behandlingsteknologi. Denne teknologien gir et effektivt komplement eller alternativ til tradisjonell kateter-emboliseringsteknologi ved nøyaktig å kontrollere blodstrømokkklusjon, sier han.
Zang bemerker at selv om denne teknologien viser potensial, er det fortsatt utfordringer å overvinne før dens kliniske anvendelse. Disse inkluderer strukturell optimalisering av mikrofiberboter, øke biokompatibiliteten til materialer og utvikling av blodkarposisjonerings- og sporingssystemer. "Forskerteamet jobber med å løse disse nøkkelproblemene for å fremme anvendelsen av teknologien," legger han til.
- SEO-drevet innhold og PR-distribusjon. Bli forsterket i dag.
- PlatoData.Network Vertical Generative Ai. Styrk deg selv. Tilgang her.
- PlatoAiStream. Web3 Intelligence. Kunnskap forsterket. Tilgang her.
- PlatoESG. Karbon, CleanTech, Energi, Miljø, Solenergi, Avfallshåndtering. Tilgang her.
- PlatoHelse. Bioteknologisk og klinisk etterretning. Tilgang her.
- kilde: https://physicsworld.com/a/magnetic-microbots-show-promise-for-treating-aneurysms-and-brain-tumours/

