19 novembre 2023 (Actualités Nanowerk) Pendant des décennies, les scientifiques ont imaginé un avenir dans lequel des robots agiles pourraient traverser des terrains accidentés et se faufiler dans des espaces restreints, idéal pour les missions de recherche et de sauvetage, l'inspection industrielle et les procédures médicales. Cependant, les robots rigides traditionnels construits à partir de matériaux durs comme les métaux se sont révélés mal adaptés à la navigation dans des environnements imprévisibles. En conséquence, les chercheurs se sont tournés vers la robotique douce, construisant des machines flexibles à partir de polymères élastiques et d’hydrogels. Mais réaliser des robots logiciels véritablement efficaces s’est avéré un défi de longue haleine. Une difficulté majeure est la locomotion. Contrairement aux robots conventionnels à roues ou à pattes, les robots continus souples manquent d'articulations discrètes. Les solutions potentielles telles que les carburants chimiques et les réseaux pneumatiques intégrés ajoutent du volume et réduisent la durabilité. Cela a suscité l’intérêt pour l’actionnement à distance utilisant la lumière pour induire un mouvement sans fil en stimulant des matériaux changeant de couleur. Le contrôle optique permet une activation rapide et précise sans composants embarqués encombrants. Plusieurs robots mous pilotés par la lumière ont été démontrés, mais jusqu'à présent, la plupart s'appuient sur des géométries complexes imprimées en 3D pour produire une propulsion nette vers l'avant à partir de l'expansion-contraction isotrope de gels photosensibles. Ces conceptions structurelles complexes sont difficiles à fabriquer, nécessitant des processus élaborés en plusieurs étapes et des équipements spécialisés coûteux. Les actionneurs planaires plus simples qui rétrécissent et gonflent symétriquement ont tendance à simplement osciller sur place. En conséquence, les robots mous existants pilotés par la lumière sont souvent lents, inefficaces, contraints à des environnements limités comme les liquides et incapables d’imiter une locomotion terrestre robuste. Aujourd'hui, des chercheurs de l'Université de technologie chimique de Pékin ont développé des robots rampants qui se déplacent comme des vers de terre lorsqu'ils sont éclairés par une lumière infrarouge. Leur approche combine des films de polymère à cristaux liquides (LCP) facilement disponibles avec une structure de poils bio-inspirée, offrant une traction directionnelle sur des surfaces planes sans impression 3D complexe. Cela marque une étape importante vers des robots logiciels pratiques, capables de traverser la variabilité des environnements du monde réel. Les résultats ont été publiés dans Systèmes intelligents avancés (« Robot souple rampant à commande photothermique avec une structure de poils bioniques semblable à un ver de terre »).
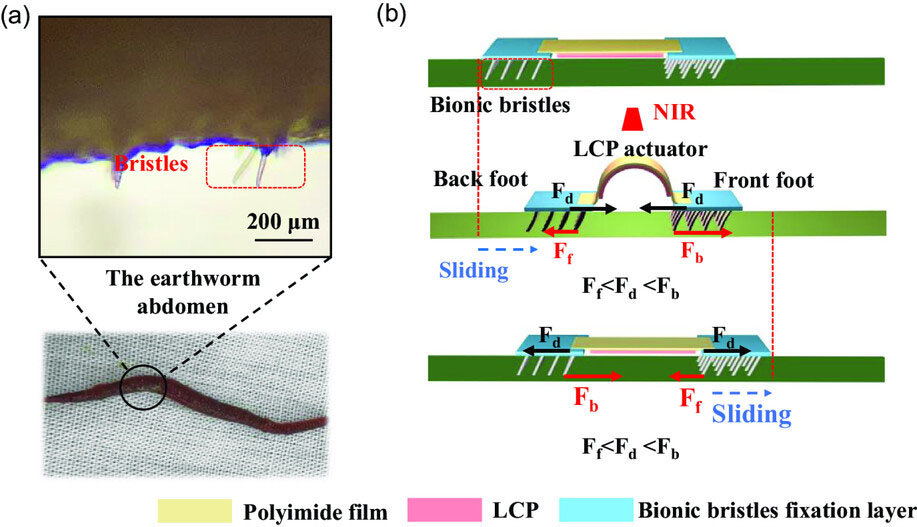 Principe bionique des robots mous. a) Le ver de terre et le gros plan des poils sur son abdomen. b) Illustrations schématiques du principe de mouvement d'un robot souple à poils bioniques sous conduite photothermique. (Réimprimé avec la permission de Wiely-VCH Verlag) Les chercheurs se sont inspirés des vers de terre, qui utilisent des rangées de poils inclinés sur leur face inférieure pour générer une asymétrie et se tirer vers l'avant lorsque les muscles se contractent. L’intégration de poils similaires avec un matériau photosensible pourrait théoriquement produire un rampant activé à distance par la lumière.
Les LCP sont apparus comme un matériau d'actionneur idéal en raison de leurs changements de longueur réversibles induits par la lumière infrarouge. À basse température, les molécules LCP s'alignent, provoquant un allongement et un redressement du film. L'irradiation infrarouge augmente suffisamment la température pour randomiser et raccourcir les molécules LCP. Cet effet photothermique est rapide, reproductible et génère des contraintes importantes capables d'effectuer un travail mécanique.
Les films LCP fournissaient le « muscle », tandis que les poils créaient des forces de friction directionnelles. Les poils inclinés vers l’arrière glissaient facilement vers l’avant mais résistaient au glissement vers l’arrière, tout comme l’anatomie du ver de terre. Cela a permis à la contraction périodique du LCP de tirer les poils vers la lumière infrarouge, tandis que la relaxation du LCP a ramené les poils vers leur orientation initiale. Le réglage de la force de l'actionneur LCP a permis des séquences répétitives qui progressaient sur des surfaces de papier planes.
La réalisation de cette conception bioinspirée a nécessité l’identification des configurations de poils optimales et l’intégration des composants dans un robot multisegment efficace. Des tests systématiques des angles et des longueurs des poils ont révélé une asymétrie maximisée d'inclinaison vers l'arrière de 60° sur le papier, avec des poils plus longs augmentant la friction de manière disproportionnée contre le mouvement vers l'arrière. Cela a permis de surmonter des forces de friction vers l'avant plus faibles par la contraction du LCP.
Les chercheurs ont construit des robots en trois parties avec des sections de poils reliées à l'avant et à l'arrière par un actionneur LCP centré. Cela a permis aux poils de glisser indépendamment plutôt que de simplement fléchir en place. L'ajustement du nombre de couches LCP a adapté la force de l'actionneur en fonction de la friction des poils. Trop faible, le robot a tendu mais n'a pas glissé ; trop fort et les poils se sont déchirés. Correctement équilibrés, les robots rampaient en continu à plus de 4 mm/min lorsqu'ils étaient éclairés par une lumière infrarouge de l'ordre du milliwatt à des distances allant jusqu'à 15 cm.
La variation de l'intensité infrarouge et de la longueur de l'actionneur module davantage la vitesse et la foulée, soulignant la polyvalence de l'approche. La simplicité des composants et du processus de fabrication laisse présager des applications telles que des caméras d’inspection qui pourraient se faufiler à travers les fissures et les crevasses inaccessibles aux robots conventionnels.
Cette nouvelle intégration de l'asymétrie bioinspirée et des matériaux photosensibles résout un défi clé qui a limité les robots mous pilotés par la lumière. La locomotion sans mouvement 3D programmé complexe ni recours à des caractéristiques environnementales rend cette stratégie plus adaptable et évolutive. Les chercheurs visent ensuite à maximiser les vitesses et l’efficacité d’exploration. À long terme, ils envisagent des possibilités telles que des robots survivants qui rampent dans les décombres à la recherche de survivants ou construisent des infrastructures sur d'autres planètes.
En imitant les solutions élégantes de la nature, la robotique douce continue de rendre plus tangible la vision des machines musculaires artificielles robotisées du monde réel.
Principe bionique des robots mous. a) Le ver de terre et le gros plan des poils sur son abdomen. b) Illustrations schématiques du principe de mouvement d'un robot souple à poils bioniques sous conduite photothermique. (Réimprimé avec la permission de Wiely-VCH Verlag) Les chercheurs se sont inspirés des vers de terre, qui utilisent des rangées de poils inclinés sur leur face inférieure pour générer une asymétrie et se tirer vers l'avant lorsque les muscles se contractent. L’intégration de poils similaires avec un matériau photosensible pourrait théoriquement produire un rampant activé à distance par la lumière.
Les LCP sont apparus comme un matériau d'actionneur idéal en raison de leurs changements de longueur réversibles induits par la lumière infrarouge. À basse température, les molécules LCP s'alignent, provoquant un allongement et un redressement du film. L'irradiation infrarouge augmente suffisamment la température pour randomiser et raccourcir les molécules LCP. Cet effet photothermique est rapide, reproductible et génère des contraintes importantes capables d'effectuer un travail mécanique.
Les films LCP fournissaient le « muscle », tandis que les poils créaient des forces de friction directionnelles. Les poils inclinés vers l’arrière glissaient facilement vers l’avant mais résistaient au glissement vers l’arrière, tout comme l’anatomie du ver de terre. Cela a permis à la contraction périodique du LCP de tirer les poils vers la lumière infrarouge, tandis que la relaxation du LCP a ramené les poils vers leur orientation initiale. Le réglage de la force de l'actionneur LCP a permis des séquences répétitives qui progressaient sur des surfaces de papier planes.
La réalisation de cette conception bioinspirée a nécessité l’identification des configurations de poils optimales et l’intégration des composants dans un robot multisegment efficace. Des tests systématiques des angles et des longueurs des poils ont révélé une asymétrie maximisée d'inclinaison vers l'arrière de 60° sur le papier, avec des poils plus longs augmentant la friction de manière disproportionnée contre le mouvement vers l'arrière. Cela a permis de surmonter des forces de friction vers l'avant plus faibles par la contraction du LCP.
Les chercheurs ont construit des robots en trois parties avec des sections de poils reliées à l'avant et à l'arrière par un actionneur LCP centré. Cela a permis aux poils de glisser indépendamment plutôt que de simplement fléchir en place. L'ajustement du nombre de couches LCP a adapté la force de l'actionneur en fonction de la friction des poils. Trop faible, le robot a tendu mais n'a pas glissé ; trop fort et les poils se sont déchirés. Correctement équilibrés, les robots rampaient en continu à plus de 4 mm/min lorsqu'ils étaient éclairés par une lumière infrarouge de l'ordre du milliwatt à des distances allant jusqu'à 15 cm.
La variation de l'intensité infrarouge et de la longueur de l'actionneur module davantage la vitesse et la foulée, soulignant la polyvalence de l'approche. La simplicité des composants et du processus de fabrication laisse présager des applications telles que des caméras d’inspection qui pourraient se faufiler à travers les fissures et les crevasses inaccessibles aux robots conventionnels.
Cette nouvelle intégration de l'asymétrie bioinspirée et des matériaux photosensibles résout un défi clé qui a limité les robots mous pilotés par la lumière. La locomotion sans mouvement 3D programmé complexe ni recours à des caractéristiques environnementales rend cette stratégie plus adaptable et évolutive. Les chercheurs visent ensuite à maximiser les vitesses et l’efficacité d’exploration. À long terme, ils envisagent des possibilités telles que des robots survivants qui rampent dans les décombres à la recherche de survivants ou construisent des infrastructures sur d'autres planètes.
En imitant les solutions élégantes de la nature, la robotique douce continue de rendre plus tangible la vision des machines musculaires artificielles robotisées du monde réel.
Principe bionique des robots mous. a) Le ver de terre et le gros plan des poils sur son abdomen. b) Illustrations schématiques du principe de mouvement d'un robot souple à poils bioniques sous conduite photothermique. (Réimprimé avec la permission de Wiely-VCH Verlag) Les chercheurs se sont inspirés des vers de terre, qui utilisent des rangées de poils inclinés sur leur face inférieure pour générer une asymétrie et se tirer vers l'avant lorsque les muscles se contractent. L’intégration de poils similaires avec un matériau photosensible pourrait théoriquement produire un rampant activé à distance par la lumière.
Les LCP sont apparus comme un matériau d'actionneur idéal en raison de leurs changements de longueur réversibles induits par la lumière infrarouge. À basse température, les molécules LCP s'alignent, provoquant un allongement et un redressement du film. L'irradiation infrarouge augmente suffisamment la température pour randomiser et raccourcir les molécules LCP. Cet effet photothermique est rapide, reproductible et génère des contraintes importantes capables d'effectuer un travail mécanique.
Les films LCP fournissaient le « muscle », tandis que les poils créaient des forces de friction directionnelles. Les poils inclinés vers l’arrière glissaient facilement vers l’avant mais résistaient au glissement vers l’arrière, tout comme l’anatomie du ver de terre. Cela a permis à la contraction périodique du LCP de tirer les poils vers la lumière infrarouge, tandis que la relaxation du LCP a ramené les poils vers leur orientation initiale. Le réglage de la force de l'actionneur LCP a permis des séquences répétitives qui progressaient sur des surfaces de papier planes.
La réalisation de cette conception bioinspirée a nécessité l’identification des configurations de poils optimales et l’intégration des composants dans un robot multisegment efficace. Des tests systématiques des angles et des longueurs des poils ont révélé une asymétrie maximisée d'inclinaison vers l'arrière de 60° sur le papier, avec des poils plus longs augmentant la friction de manière disproportionnée contre le mouvement vers l'arrière. Cela a permis de surmonter des forces de friction vers l'avant plus faibles par la contraction du LCP.
Les chercheurs ont construit des robots en trois parties avec des sections de poils reliées à l'avant et à l'arrière par un actionneur LCP centré. Cela a permis aux poils de glisser indépendamment plutôt que de simplement fléchir en place. L'ajustement du nombre de couches LCP a adapté la force de l'actionneur en fonction de la friction des poils. Trop faible, le robot a tendu mais n'a pas glissé ; trop fort et les poils se sont déchirés. Correctement équilibrés, les robots rampaient en continu à plus de 4 mm/min lorsqu'ils étaient éclairés par une lumière infrarouge de l'ordre du milliwatt à des distances allant jusqu'à 15 cm.
La variation de l'intensité infrarouge et de la longueur de l'actionneur module davantage la vitesse et la foulée, soulignant la polyvalence de l'approche. La simplicité des composants et du processus de fabrication laisse présager des applications telles que des caméras d’inspection qui pourraient se faufiler à travers les fissures et les crevasses inaccessibles aux robots conventionnels.
Cette nouvelle intégration de l'asymétrie bioinspirée et des matériaux photosensibles résout un défi clé qui a limité les robots mous pilotés par la lumière. La locomotion sans mouvement 3D programmé complexe ni recours à des caractéristiques environnementales rend cette stratégie plus adaptable et évolutive. Les chercheurs visent ensuite à maximiser les vitesses et l’efficacité d’exploration. À long terme, ils envisagent des possibilités telles que des robots survivants qui rampent dans les décombres à la recherche de survivants ou construisent des infrastructures sur d'autres planètes.
En imitant les solutions élégantes de la nature, la robotique douce continue de rendre plus tangible la vision des machines musculaires artificielles robotisées du monde réel.
- Contenu propulsé par le référencement et distribution de relations publiques. Soyez amplifié aujourd'hui.
- PlatoData.Network Ai générative verticale. Autonomisez-vous. Accéder ici.
- PlatoAiStream. Intelligence Web3. Connaissance Amplifiée. Accéder ici.
- PlatonESG. Carbone, Technologie propre, Énergie, Environnement, Solaire, La gestion des déchets. Accéder ici.
- PlatoHealth. Veille biotechnologique et essais cliniques. Accéder ici.
- La source: https://www.nanowerk.com/news2/robotics/newsid=64071.php

