Une équipe de chercheurs chinois a développé de nouveaux « robots en microfibres » à enroulement magnétique et les a utilisés pour emboliser des saignements artériels chez un lapin, ouvrant ainsi la voie à une gamme de traitements contrôlables et moins invasifs pour les anévrismes et les tumeurs cérébrales.
Lorsqu'ils tentent d'arrêter le saignement dans les anévrismes ou d'endiguer le flux sanguin vers les tumeurs cérébrales (un processus connu sous le nom d'embolisation), les chirurgiens font généralement passer un mince cathéter dans l'artère fémorale et le font circuler dans les vaisseaux sanguins pour administrer des agents emboliques. Bien que largement utilisés, ces cathéters sont difficiles à guider à travers des réseaux vasculaires complexes.
Afin de relever ce défi, une équipe de chercheurs de l'Université des sciences et technologies de Huazhong (HUST) a créé de minuscules robots en microfibres magnétiques et doux qui peuvent effectuer de telles procédures à distance. Les dispositifs, fabriqués à partir d'une fibre magnétisée torsadée en forme d'hélice, peuvent s'adapter à une gamme de tailles de récipients différentes et se déplacer en forme de tire-bouchon lorsqu'ils sont exposés à un champ magnétique externe. Les résultats de la recherche, présentés dans sciences Robotique, démontrent comment les dispositifs ont été utilisés avec succès pour endiguer les saignements artériels chez un lapin.
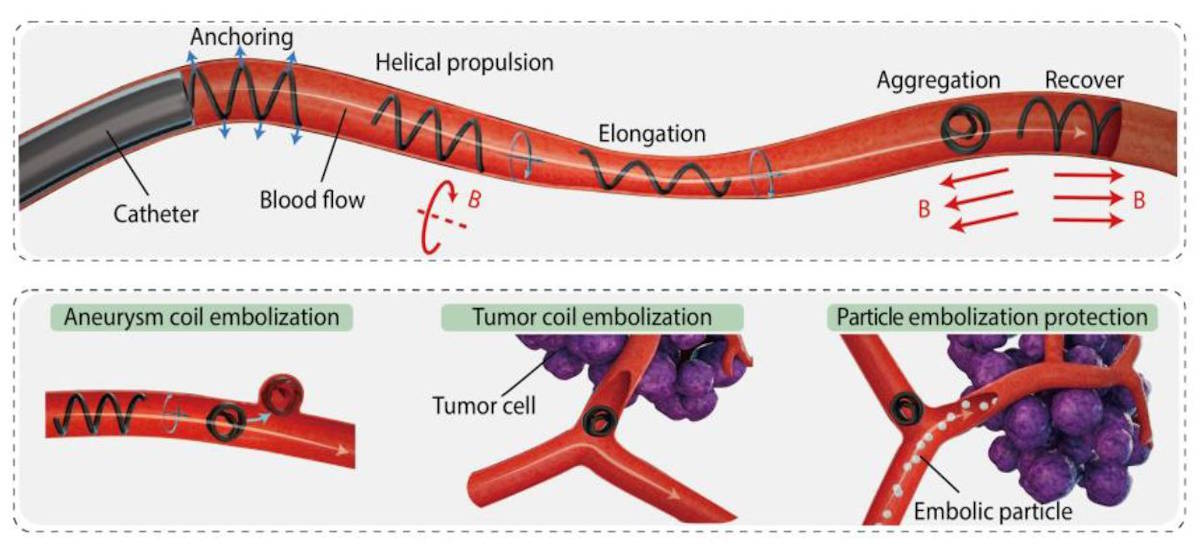
En tant que co-auteur Jianfeng Zhang explique que les microfibrebots sont fabriqués en utilisant l'énergie thermique pour transformer des matériaux composites magnétiques souples en microfibres, qui sont ensuite « magnétisées et moulées pour leur donner une polarité magnétique hélicoïdale ». En contrôlant le champ magnétique, le robot magnétique en microfibres douces a démontré une transformation morphologique réversible (élongation ou agrégation) et une propulsion en spirale à travers le flux sanguin (en amont et en aval). Cela lui permet de naviguer dans des systèmes vasculaires complexes et d’effectuer une embolisation robotique dans la région submillimétrique.
« L'article montre comment nous avons réalisé in vitro embolisation d'anévrismes et de tumeurs dans un modèle neurovasculaire, et réalisation d'une navigation robotisée et d'une embolisation sous fluoroscopie en temps réel dans un in vivo modèle d'artère fémorale de lapin », explique Zang. « Ces expériences démontrent la valeur clinique potentielle de ce travail et ouvrent la voie à de futures options chirurgicales d’embolisation assistée par robot. »
Fonction d'ancrage
Selon le premier auteur Xurui Liu, doctorant à HUST, chaque microfibrebot possède une fonction d'ancrage, similaire à celle d'un stent vasculaire, lui permettant d'être ancré de manière stable à la paroi interne des vaisseaux sanguins par friction de contact pour éviter d'être emporté par le flux sanguin.
« Sa distribution de magnétisation hélicoïdale confère au robot microfibre une direction de magnétisation nette le long de son axe central. En appliquant un champ magnétique externe cohérent avec la direction de la magnétisation nette, le robot peut être allongé », dit-elle.
"À l'inverse, lorsque le champ magnétique externe est opposé à la direction de la magnétisation nette, le robot se rassemble", ajoute-t-elle. "La douceur et la grande robustesse de ce robot en microfibre garantissent que sa fonction de reconstruction morphologique reste entièrement réversible après plus de mille cycles d'agrégation et d'allongement."
Alternative prometteuse
Contrairement aux robots magnétiques souples rapportés dans des recherches antérieures, Zang confirme que les caractéristiques de direction de magnétisation hélicoïdale des nouveaux robots permettent à leurs modes de déformation et de mouvement d'être découplés orthogonalement indépendamment du champ magnétique de contrôle, offrant ainsi « une flexibilité unique de contrôle du champ magnétique ».
"Cette fonctionnalité permet non seulement à un seul robot en microfibres de se déplacer à grande vitesse contre le flux sanguin sous l'action d'un champ magnétique rotatif, mais permet également un contrôle indépendant de la forme et du mouvement de plusieurs robots en microfibres", explique Zang.
« De plus, ces dispositifs sont compatibles avec les cathéters interventionnels couramment utilisés afin de maximiser leur potentiel d'utilisation en milieu clinique », ajoute-t-il.
Face aux défis des méthodes traditionnelles telles que l'embolisation par cathéter – notamment en termes de limites opérationnelles et de précision insuffisante, ainsi qu'aux risques pour la santé liés à l'exposition prolongée des médecins aux rayonnements (du guide des rayons X système) – Zang souligne que le développement de la technologie des microfibrebots magnétiques offre aux cliniciens un nouveau moyen d’améliorer les traitements existants.

Des microrobots magnétiques s'alignent pour la thérapie par cellules souches
« Le développement de microfibrebots offre une nouvelle perspective pour le traitement de l'embolisation vasculaire et montre un potentiel d'application dans la technologie de traitement chirurgical mini-invasif. Cette technologie constitue un complément efficace ou une alternative à la technologie traditionnelle d'embolisation par cathéter en contrôlant avec précision l'occlusion du flux sanguin », dit-il.
Zang note que même si cette technologie présente du potentiel, il reste encore des défis à surmonter avant son application clinique. Il s’agit notamment de l’optimisation structurelle des robots microfibres, de l’augmentation de la biocompatibilité des matériaux et du développement de systèmes de positionnement et de suivi des vaisseaux sanguins. « L’équipe de recherche s’efforce de résoudre ces problèmes clés afin de faire progresser l’application de la technologie », ajoute-t-il.
- Contenu propulsé par le référencement et distribution de relations publiques. Soyez amplifié aujourd'hui.
- PlatoData.Network Ai générative verticale. Autonomisez-vous. Accéder ici.
- PlatoAiStream. Intelligence Web3. Connaissance Amplifiée. Accéder ici.
- PlatonESG. Carbone, Technologie propre, Énergie, Environnement, Solaire, La gestion des déchets. Accéder ici.
- PlatoHealth. Veille biotechnologique et essais cliniques. Accéder ici.
- La source: https://physicsworld.com/a/magnetic-microbots-show-promise-for-treating-aneurysms-and-brain-tumours/

